이제 uart를 통해 터미널에서 N 100개 찍히는걸 확인했으니
이제 pritntf 함수를 구현해 hello world 출력을 구현한다.
printf는 stdio.h에 가져와서 쓰고 일단 putstr부터 만들면
lib/stdio.h
#ifndef LIB_STDIO_H_
#define LIB_STDIO_H_
uint32_t putstr(const char* s);
#endif
lib/stdio.c
#include <stdint.h>
#include "HalUart.h"
#include "stdio.h"
uint32_t putstr(const char* s)
{
uint32_t c =0;
while(*s)
{
Hal_uart_put_char(*s++);
c++;
}
return c;
}
make file에다가도 추가된 lib 폴더와 stdio.c/.h 파일추가해준뒤
ARCH=armv7-a
MCPU=cortex-a8
TARGET=rvpb
CC=arm-none-eabi-gcc
AS=arm-none-eabi-as
LD=arm-none-eabi-ld
OC=arm-none-eabi-objcopy
LINKER_SCRIPT=./navilos.ld
MAP_FILE=build/navilos.map
ASM_SRCS=$(wildcard boot/*.S)
ASM_OBJS=$(patsubst boot/%.S, build/%.os, $(ASM_SRCS))
VPATH = boot \
hal/$(TARGET) \
lib
C_SRCS = $(notdir $(wildcard boot/*.c))
C_SRCS += $(notdir $(wildcard hal/$(TARGET)/*.c))
C_SRCS += $(notdir $(wildcard lib/*.c))
C_OBJS = $(patsubst %.c, build/%.o, $(C_SRCS))
INC_DIRS = -I include \
-I hal \
-I hal/$(TARGET) \
-I lib
CFLAGS = -c -g -std=c11
navilos=build/navilos.axf
navilos_bin=build/navilos.bin
.PHONY: all clean run debug gdb
all:$(navilos)
clean:
@rm -fr build
run: $(navilos)
qemu-system-arm -M realview-pb-a8 -kernel $(navilos) -nographic
debug: $(navilos)
qemu-system-arm -M realview-pb-a8 -kernel $(navilos) -S -gdb tcp::1234,ipv4
gdb:
gdb-multiarch
$(navilos):$(ASM_OBJS) $(C_OBJS) $(LINKER_SCRIPT)
$(LD) -n -T $(LINKER_SCRIPT) -o $(navilos) $(ASM_OBJS) $(C_OBJS) -Map=$(MAP_FILE)
$(OC) -O binary $(navilos) $(navilos_bin)
build/%.os: %.S
mkdir -p $(shell dirname $@)
$(CC) -mcpu=$(MCPU) $(INC_DIRS) $(CFLAGS) -o $@ $<
build/%.o: %.c
mkdir -p $(shell dirname $@)
$(CC) -mcpu=$(MCPU) $(INC_DIRS) $(CFLAGS) -o $@ $<
boot/Main.c도 수정
#include <stdint.h>
#include "HalUart.h"
#include "stdio.h"
static void Hw_init(void);
void main(void)
{
Hw_init();
uint32_t i = 100;
while(i--)
{
Hal_uart_put_char('N');
}
Hal_uart_put_char('\n');
putstr("Hello World!\n");
}
static void Hw_init(void)
{
Hal_uart_init();
}
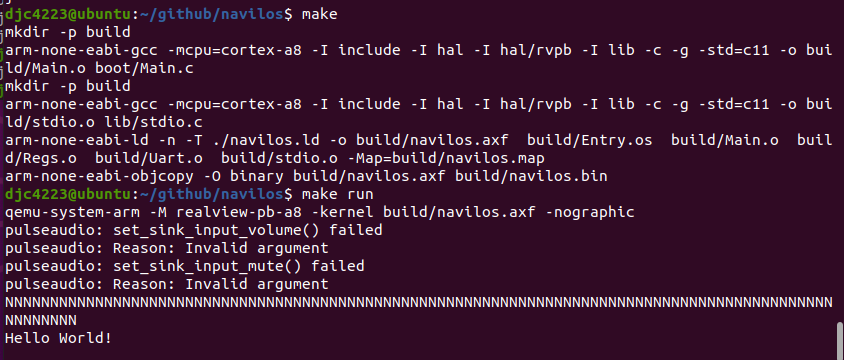
빌드하면 메인 함수에 작성한대로
Hello world가 잘 출력되었다.
이번에는 getchar를 구현할 차례인대
송신 버퍼가 비워진지 확인하고, 데이터 레지스터에 값을 넣는 식으로 송신했듯이
이번에는 수신 버퍼가 채워진지 체크하고,
체워지면 데이터레지스터에서 값을 받아오면 되는 식이다.
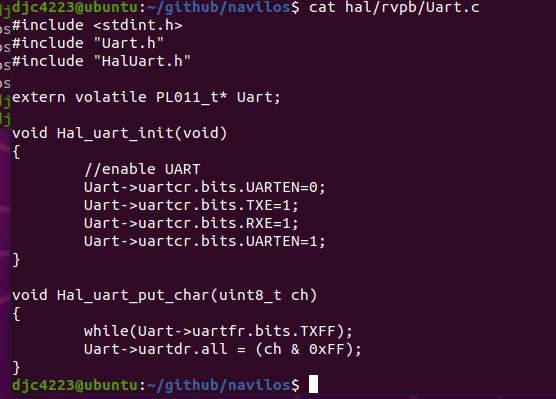
hal/rvpb/Uart.c와
hal/HalUart.h에 get char 관련 함수를 추가해주자.
수신 버퍼가 채워지면, 에러있는경우 클리어해주고 아니면 데이터를 받아와 반환해주는 내용이다.
uint8_t Hal_uart_get_char(void)
{
uint8_t data;
while(Uart->uartfr.bits.RXFE);
//check for and error flag
if (Uart->uartdr.all & 0xFFFFFF00)
{
//clear the error
Uart->uartrsr.all = 0xFF;
return 0;
}
data = Uart->uartdr.bits.DATA;
return data;
}hal/HalUart.h
#ifndef HAL_HALUART_H_
#define HAL_HALUART_H_
void Hal_uart_init(void);
void Hal_uart_put_char(uint8_t ch);
uint8_t Hal_uart_get_char(void);
#endif /* HAL_HAALUART_H_ */
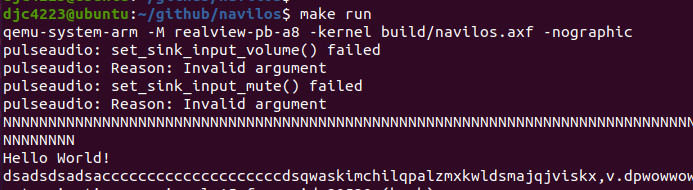
main.c도 입력받은 뒤 에코하도록 수정해서 보면
#include <stdint.h>
#include "HalUart.h"
#include "stdio.h"
static void Hw_init(void);
void main(void)
{
Hw_init();
uint32_t i = 100;
while(i--)
{
Hal_uart_put_char('N');
}
Hal_uart_put_char('\n');
putstr("Hello World!\n");
i = 100;
while(i--)
{
uint8_t ch = Hal_uart_get_char();
Hal_uart_put_char(ch);
}
}
static void Hw_init(void)
{
Hal_uart_init();
}
빌드하고 돌린뒤 키보드 입력을 주면 딜레이가 좀 있긴하지만 동작하긴한다.
'컴퓨터과학 > os' 카테고리의 다른 글
| 나빌로스 하다가 찾은 문제 (0) | 2022.08.20 |
|---|---|
| navilos - 9. UART 3 printf 구현하기 (0) | 2022.08.20 |
| navilos - 7. UART 1 (0) | 2022.08.18 |
| navilos - 6. 익셉션 핸들러 구현2, 메인함수 진입 (0) | 2022.08.18 |
| navilos - 5. 익셉션 핸들러 구현 1 (0) | 2022.08.17 |