센서 종류
- 누름 버튼 스위치 : 사용자 입력 학인하는 기본적인 장치. a접점(NO normally open), b접점(NC)
- 빛감지 센서 : 적외선 센서, 조도 센서, 포토다이오드
- 회전각 센서 : 모터 축에 연결되어 모터 회전각도 검출. 절대형 엔코더, 증분형 엔코더(상의 변화로 회전방향과 각도파악)
 |
 |
 |
 |
| 누름버튼 스위치 | 적외선 센서 | 조도센서 | 포토다이오드 |
 |
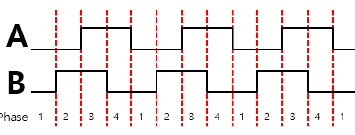 |
| 절대 엔코더와 증분 엔코더 | 증분 엔코더의 상 |
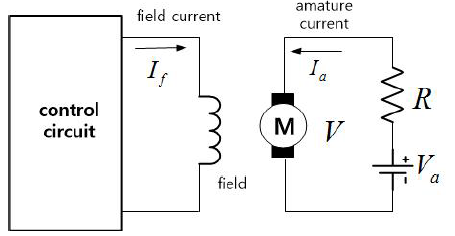
- 회전속도 센서 : 타코 제네레이터는 모터축에 연결되 회전속도에 비례하는 전압 출력. 각 검출은 안됨. 작은전압이라 노이즈영향, 아날로그 입력으로 연결해 씀
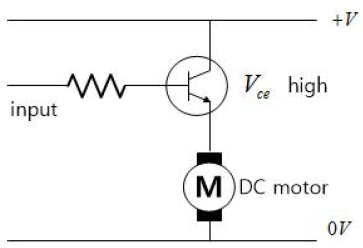
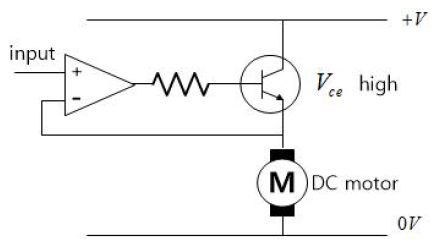
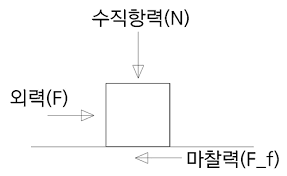
- 압력센서 : 가해지는 힘 측정. 압력 크기에 따라 아날로그 신호 처리->신호크기가 작아 op앰프나 트랜지스터로 증폭해 아날로그로 입력.
- 힘/토크 센서: 스트레인 게이지, 비틀림각 방식으로 힘과 토크 측정. 아날로그, 디지털 등 다양하게 출력
 |
 |
 |
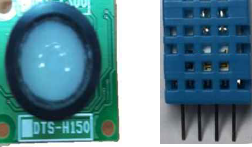 |
| 타코제네레이터 | 압력센서 | 토크 센서 | 온도, 습도센서 |
- 거리 센서 : 적외선(30cm 내외 근거리), 초음파(수 m 거리 측정, 되돌아오는시간계산), 레이저(넓은범위, 반사된 레이저 수신각, 위상으로 측정) 등.
- 기울기, 가속도, 자이로 센서 : 각축방향으로 기울어진 정도, 속도를 출력. 자이로는 회전각속도 측정에 사용.
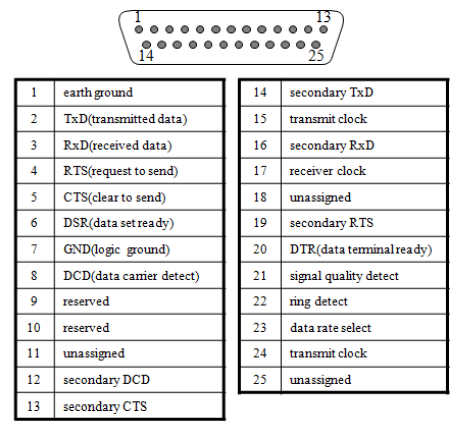
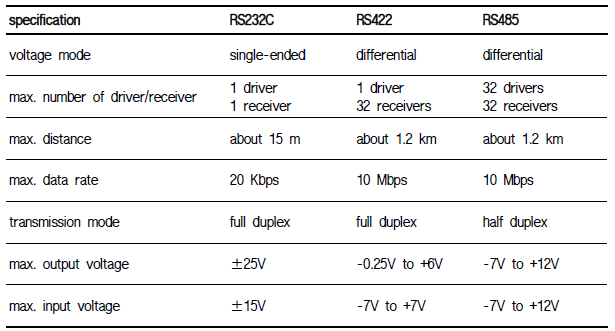
- GPS : 4개 이상 위성 신호로 지구 좌표계에서 센서 위치 알려줌. 규정된 통신 프레임에 경도, 위도, 속도, 높이 등 정보를 RS-232/422, CAN 통신으로 출력.
- 비전 센서 : CCD or CMOS 소자로 만든 이미지 센서에 렌즈 + 회로로 만든 센서. 단안 비전 센서와 여러 카메라를 쓴 스테레오 비전 센서로 분류
 |
 |
 |
 |
| 적외선, 초음파, 레이저 센서 | 관성센서 | GPS 수신기 | 단안, 양안카메라 |
센서 출력 신호
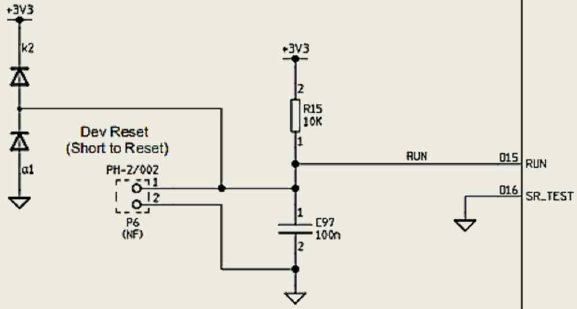
1. 디지털 출력
- 0V(off), 5V(on) 출력. 전압 크기에 따라서 3.3V를 출력하기도. 전선이 길수록 감쇄되므로 리피터쓰기도함.
2. 아날로그 츨력
- 0~5V 사이 전압 or 4 ~ 20mA 전류로 출력. 전류출력의 경우 250옴 저항 연결해 전압신호를 MCU에 전달.
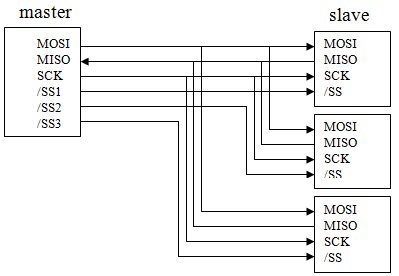
3. 통신프레임 출력
- 센서 출력값이 여러개가 있거나 ADC 변환 시 발생하는 오차를 없애기 위해 문자열로 전달하는 경우 통신 프로토콜과 프레임으로 결과 출력.
- 레이저 처럼 정밀한 측정값이 필요한 겨우 센서 내부 CPU가 계산한 최종 출력을 통신 프레임 문자열으로 출력
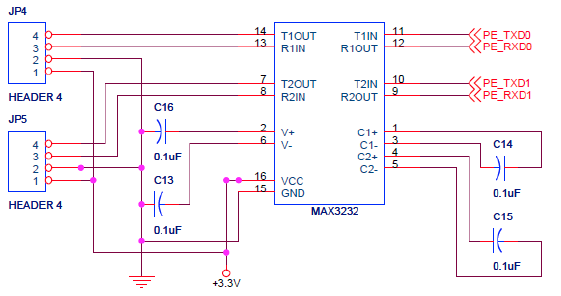
- RS-232/422, SPI, I2C(TWI) 등 통신 프로토콜 사용.
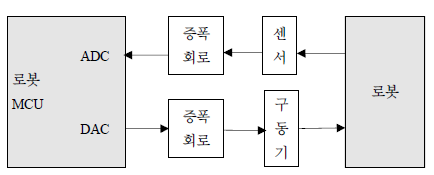
아날로그 출력 센서 수동 필터
- 센서 출력이 아날로그인 경우 MCU는 ADC를 통해 신호 수신
- ADC는 0~ 5(3.3)V 전압을 받으나 센서 출력신호가 작은경우 증폭기를, 너무큰경우 분배기를 써 MCU가 받을수있는 전압범위로 변환
+ 센서 출력의 노이즈 제거를 위해 필터 사용
- 수동 필터 : 저항, 코일, 캐패시터 RLC 소자로만 구성된 필터
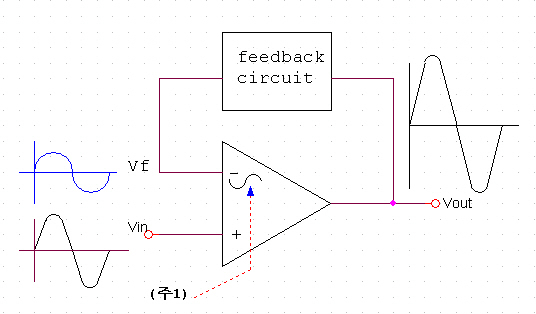
<-> 능동 필터 : OP 앰프를 포함시켜, 입력전압보다 추력 전압을 키우는 필터.
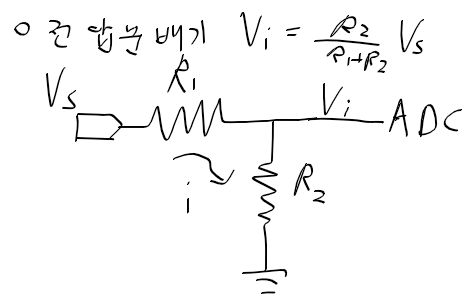
1. 전압분배기
- 입력 전압을 분배, 축소시키는 회로. 입력 전압을 두 저항 R1, R2를 두어 R2에 걸리는 전압 Vi를 보냄.
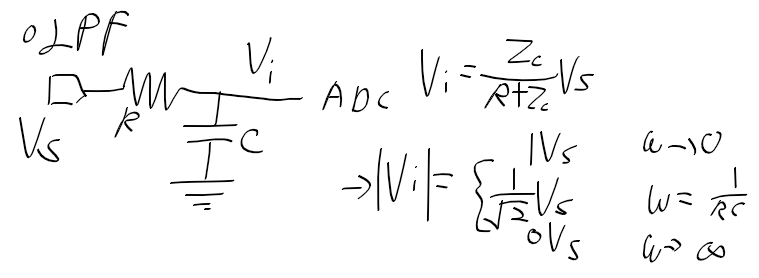
2. 고역통과필터 HPF
- 센서 신호에 포함된 오프셋 전압(기본 고정전압) 혹은 드리프트 전압(주변 온도 변화에 의해 변하는 오프셋전압)을 제거하기위함.
- 캐패시터 임피던스 Zc= 1/wC = 1/(2 pi f C)
=> 고주파일수록 임피던스가 작고, 저주파일수록 임피던스가 커진다 => 고주파만 지나간다.
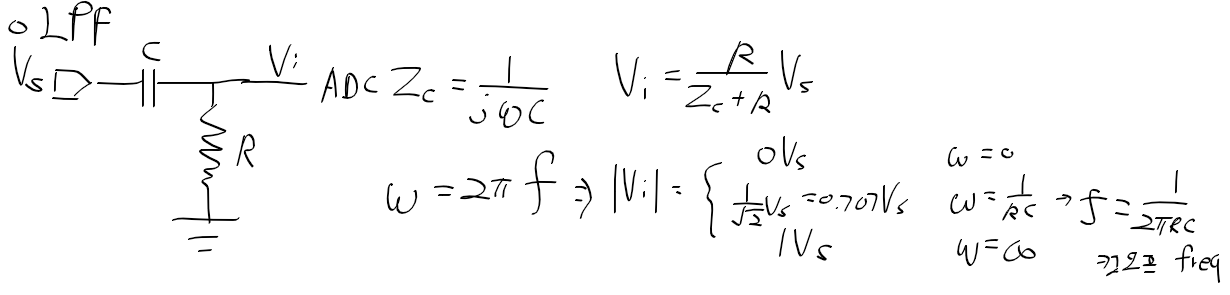
3. 저역통과필터 LPF
- 신호에 포함된 고주파 잡음 제거에 사용
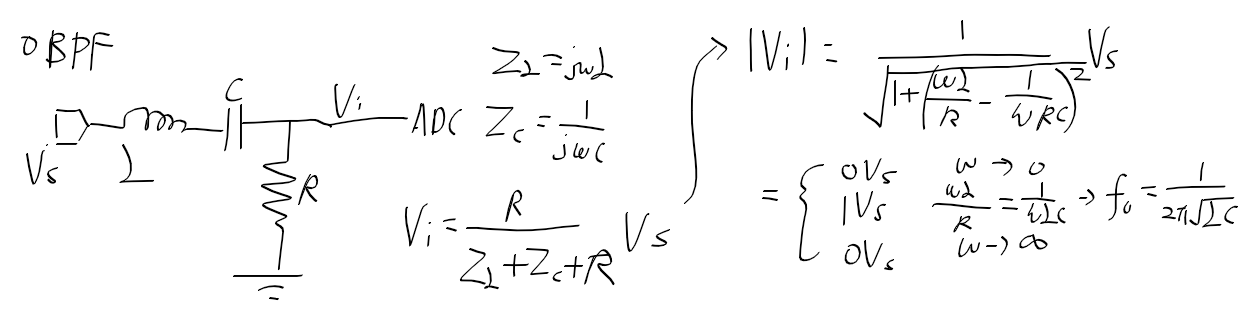
4. 대역통과필터 BPF
- 저주파, 고주파 사이 특정 대역 신호뫈 수신할때 사용. 고역통과필터에 코일 추가
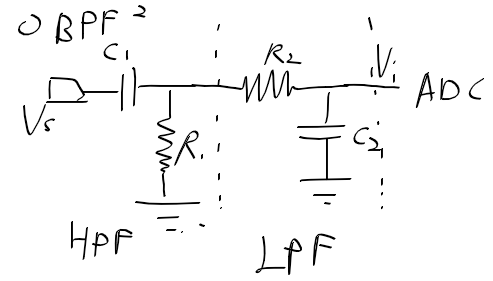
5. 대역통과필터 2
- 코일은 무겁고, 부피가크며, 비용이 크다. => 고역통과필터와 저역통과필터를 직렬로 연결해 만들수 있다.
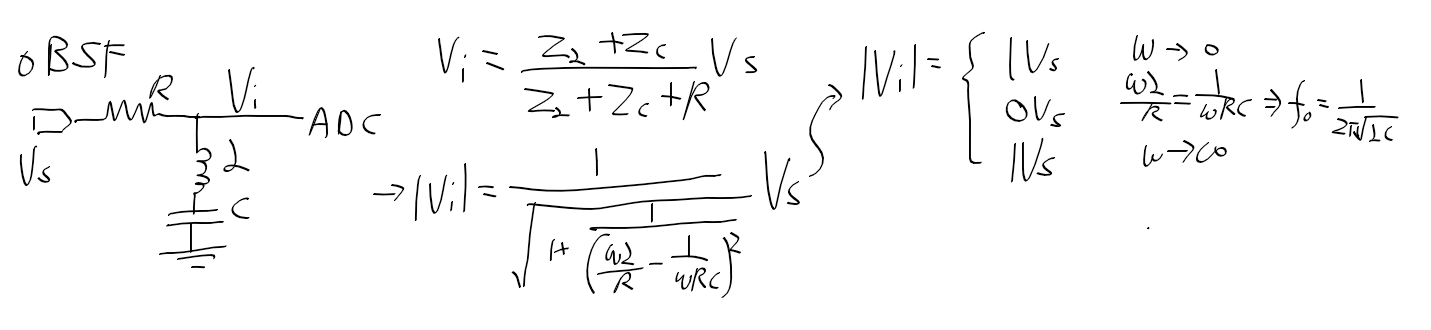
6. 대역차단필터 BSF BRF(Band Stop, Band Reject Filter)
- 저주파와 고주파사이 특정 대역 제거
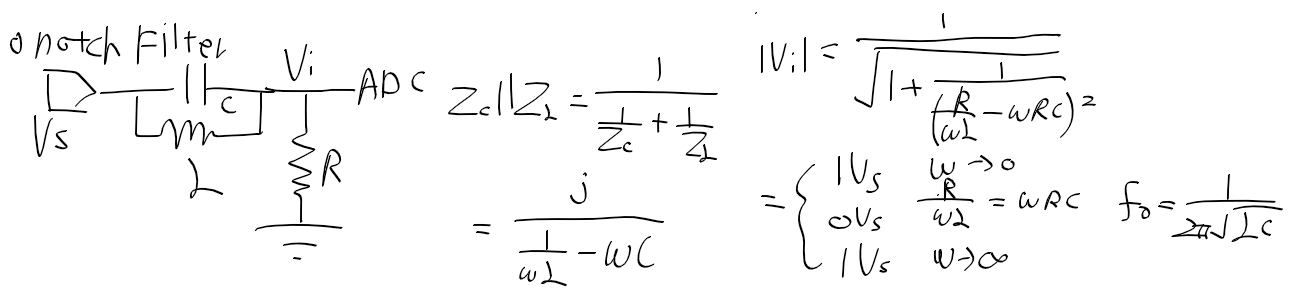
7. 특정주파수 차단 필터 notch filter
- 대역차단필터의 한종류로 특정 주파수에서 급격히 감소
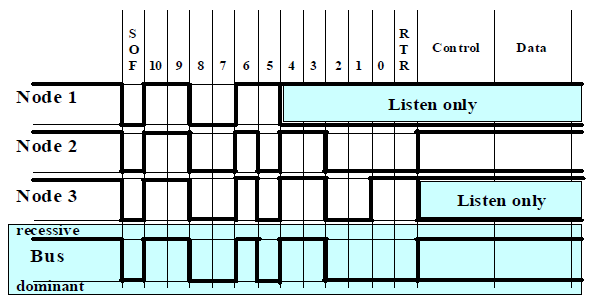
통신데이터 오류 확인
- 디지털 데이터는 아날로그 데이터에 비해 노이즈가 강하나 통신선이나 PCB패턴에 의해 노이즈가 추가되기도 함
-> 패리티 체크, 체크섬 사용. 오류 확인 + 수신데이터 정정하는 방법으로 CRC 있음
- 패리티 체크 : 홀수 페리티, 짝수 페리티 방법이 존재. 페리티 비트를 추가해 1의 개수가 홀수 혹은 짝수개가 되도록 함.
-> 수신후 정한 패리티 방식과 일치하는 데이터만 사용
- 체크섬 : 글자 하나 하나 오류 체크를 위해 패리티 비트를쓴것과 달리 여러 글자로 이뤄진 패킷에 대한 오류 확인
1. "#NCS" 송신 시 패킷 데이터 16진수 총합의 하위 8비트를 체크섬으로 뒤에 덧붙임.
2. 센서 데이터를 수신 후 체크섬 다시 계산하여 받은 체크섬과 계산한 체크섬이 일치하는지 비교.
샘플링과 주파수
- 샘플링 : MCU가 센서 신호를 수신하기위해 일정 시간마다 확인하는것
- 나이퀴스트 주파수 : 신호 내 최고 주파수의 2배 이상 주파수로 샘플링해야 원래대로 복원 가능. f_s >= 2f_m
=> MCU의 샘플링 주파수가 100kHz인 경우, 최대 50kHz 신호 복원 가능. 50kHz 이상 고주파가 없도록 LPF 설계
'하드웨어' 카테고리의 다른 글
| 로봇HW - 3. 입출력 HW (0) | 2022.09.14 |
|---|---|
| 로봇HW - 2. 로봇 액추에이터 (0) | 2022.09.14 |
| 로봇HW - 1. MCU HW (0) | 2022.09.08 |
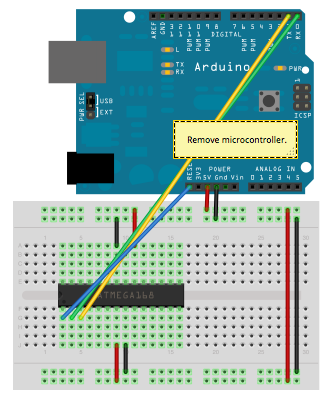
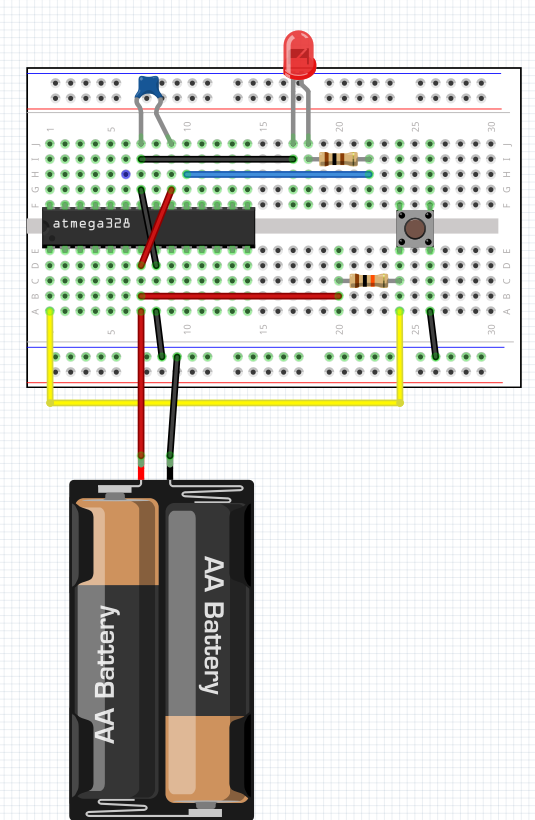
| 아두이노회로만들기 - 3. 베터리 쓰기, 내부 클럭 쓰기, LED 점멸 (0) | 2022.07.19 |
| automata - 6. 기계 요소의 모션 (0) | 2022.07.05 |