종류
1. ultrasonic sensor
2. PSD Position Sensitive Device
3. Encoder
4. Hall effect sensor
5. Capacitance sensor
6. Eddy current sensor
7. IMU
8. UWB Communication
1. 초음파 센서
1. 트리거 펄스 입력 : DSP IO포트로부터 트리거 신호를 트리거 펄스 인풋에 10us 보내주면 초음파(8사이클) 보낸다.
2. 초음파 에코 단자(에코펄스 출력)에서 로에서 하이로 바뀐다.
- 이 신호의 라이징 에지를 잡고, 초음파가 물체에 갔다 돌아오는 시간을 재야하므로 타이머 시작.
3. 초음파가 돌아오면 에코 단자의 신호가 다시 Low로 바뀌고 타이머 정지
-> 초음파가 돌아올때까지의 시간과 음포 속도로 거리 측정. 거리 = 시간 x 음속 / 2
인식 범위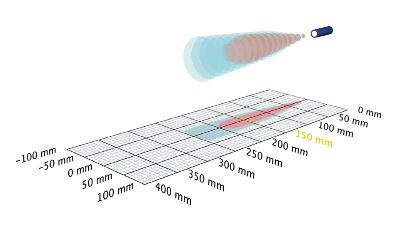 https://www.microsonic.de/kr/support/ultrasonic-technology/detection-zones.htm |
SRF04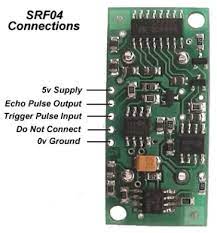 http://www.datasheetcafe.com/srf04-datasheet-pdf/ |
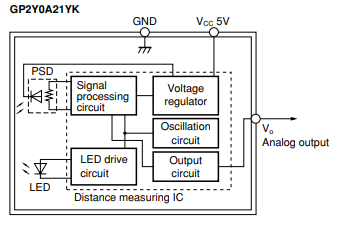
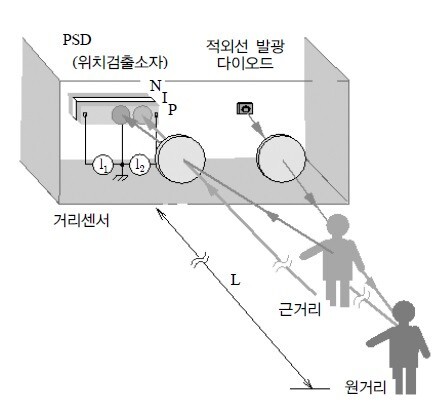
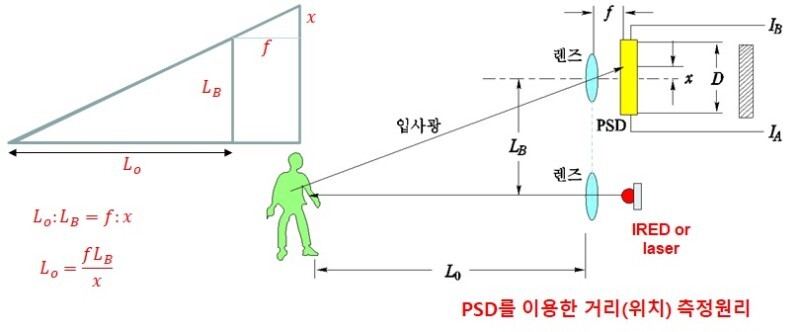
2. PSD 센서
- 저가, 신뢰성 있음.
- 대상물이 위치에 따라 센서와 거리, 빛이 반사되는 각도가 다름
- 측정 거리 L은 L_o : L_b = f : x 즉, L_o = L_b * f/ x
- 송신부 : 적외선 발광 다이오드
- 수광부 : 렌즈의 배열로 있음
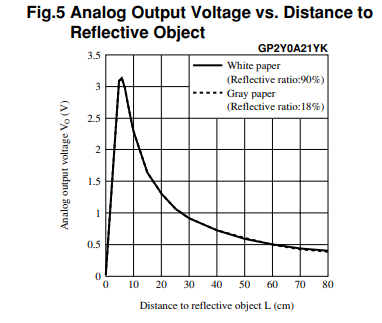
- 특징(GPY0A21YK)
측정 거리 : 10 ~ 80cm
패키징 크기 : 29.5 x 13 x 13.5
공급전압 : 4.5 ~ 5.5v
소비전류 : 30mA
  https://m.blog.naver.com/iotsensor/221907920725 |
   |
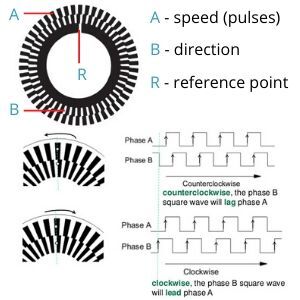
3. 엔코더
- 증분 엔코더 : 회전식 펄스 카운팅
- A상은 펄스 속도, B상은 방향 확인을 위함
- 앱솔루트 엔코더 : 회전각에 따라 다른 출력신호
* 그레이 코드 표기 : 1비트씩 바뀐다. 경계점에서 완전히 다른 코드로 바뀌는 문제 개선
 |
 https://www.freego2.de/index.php/technical-info/encoders 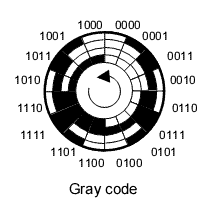 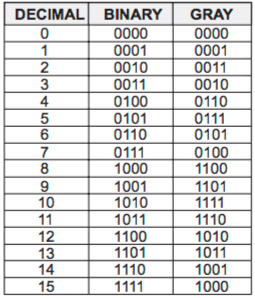 |
4. 홀 이펙트 센서
- 홀전압은 자기장과 입력 절뉴에 비례
- 회전체의 각도 방위 측정에 활용
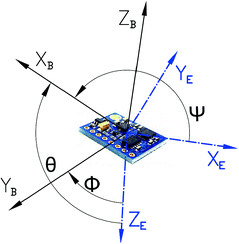
5. IMU(가속도계 + 각속도계)
- 이동관성(가속도) + 회전관성(각속도) + 지자기계 측정
- 센서내 마이크로프로세서로 계산. 데이터를 I2C, SPI로 가져와 사용.
 |
 |
센서의 신호처리 - 필터 종류.
- Low Pass Filter : 저역통과(저주파) 필터. 고주파 노이즈 제거(ex. 가속도 센서)
- High Pass Filter : 고역통과필터. 저주파 노이즈 제거하는 경우(ex. 센서 적분 데이터)
- Band Pass Filter : 특정 주파수 대역만 통과.
- Band Stop Filter : 대역 제거 필터. 특정 대역 신호만 제거.
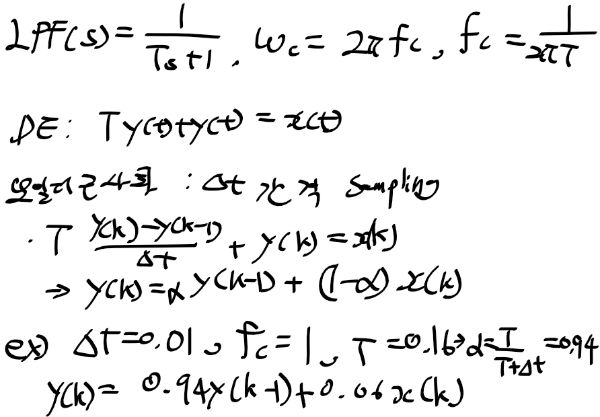
1차 저주파 통과 필터 구현 1st Low Pass Filter
- 아날로그 필터와 디지털 필터. 디지털 필터(코딩해서 신호 처리)를 주로 구현
* 실험해보기 : IMU 센서 데이터를 저주파 통과 필터로 필터링
'로보틱스' 카테고리의 다른 글
| robotics - 3. 모터 제어 (0) | 2022.09.06 |
|---|---|
| robotics - 2. 로봇 비전 (0) | 2022.09.06 |
| ROS기초튜토리얼(끝) - 15, 16. 간단한 서비스,클라이언트 코드 쓰기 + 사용하기 (0) | 2022.06.24 |
| ROS기초튜토리얼 - 12, 13. 파이썬으로 간단한 퍼블리셔와 서브스크라이버 만들고 쓰기 (0) | 2022.06.23 |
| ROS기초튜토리얼 - 10. ROS msg와 srv 만들기 (0) | 2022.06.23 |