지난번에 엉성하게나마 atmega328p-pu를 이용한 보드를 만들었다.
보드를 만들었다 치고나서 외형이 필요한데
어떻게 시작해야할지 잘 감이 안잡히더라
기어, 볼트, 너트, 프레임 같은게 필요할거같은데
영 시중에는 내가원하는 책이 잘 보이지 않았다.
이런게 결국 오토마타에 대한 내용이니 이거에 관한 동영상강의 찾다보니
마침 gcamp에서 퓨전 360을 이용한 오토마타는 물론 강의를 많이 올려놓으셧더라
그래서 이걸 주제로 준비해보려고 한다.
기계 매커니즘과 요소
- 기계의 운동 : 직선, 회전, 복합 운동
- 기계 요소
결합 요소 : 나사, 키, 핀 등 체결하는데 사용하는 부품
전동 요소 : 회전축, 마찰자, 벨트 풀리, 기어 등 동력을 전달하는 부품
축 요소 : 축, 베어링 등 축을 연결하거나 지지하는 요소
관 요소
제어 요소

ref : https://terms.naver.com/entry.naver?docId=1070606&cid=40942&categoryId=32351
레버(지렛대)
- 작은 힘으로 큰 힘을 내어 운동
ref : https://terms.naver.com/entry.naver?docId=506582&cid=42380&categoryId=42380
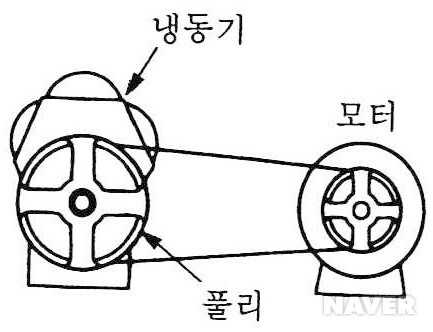
기계의 전동 요소(폴리-벨트, 스프로킷-체인, 기어)
- 풀리 : 운동, 힘을 전달하기위해 벨트를 거는 축바퀴
- 두 축에 달린 풀리에 벨트를 걸어 동력 전달
ref : https://terms.naver.com/entry.naver?docId=720443&cid=42319&categoryId=42319
- 스프로킷 : 회전 축에 고정, 체인의 마디에 끼워 회전시키면 동력이 전달
-> 미끄럼없이 큰 동력이 전달가능하나 소음이 크다.
ex : 자전거 패달

ref : https://terms.naver.com/entry.naver?docId=923359&cid=47326&categoryId=47326
-기어 : 2개 또는 이상의 축간에 회전/동력을 전달하는 장치로 힘을 확대, 축소, 회전 방향이나 속도 등 조절
ref : https://terms.naver.com/entry.naver?docId=923125&cid=47326&categoryId=47326
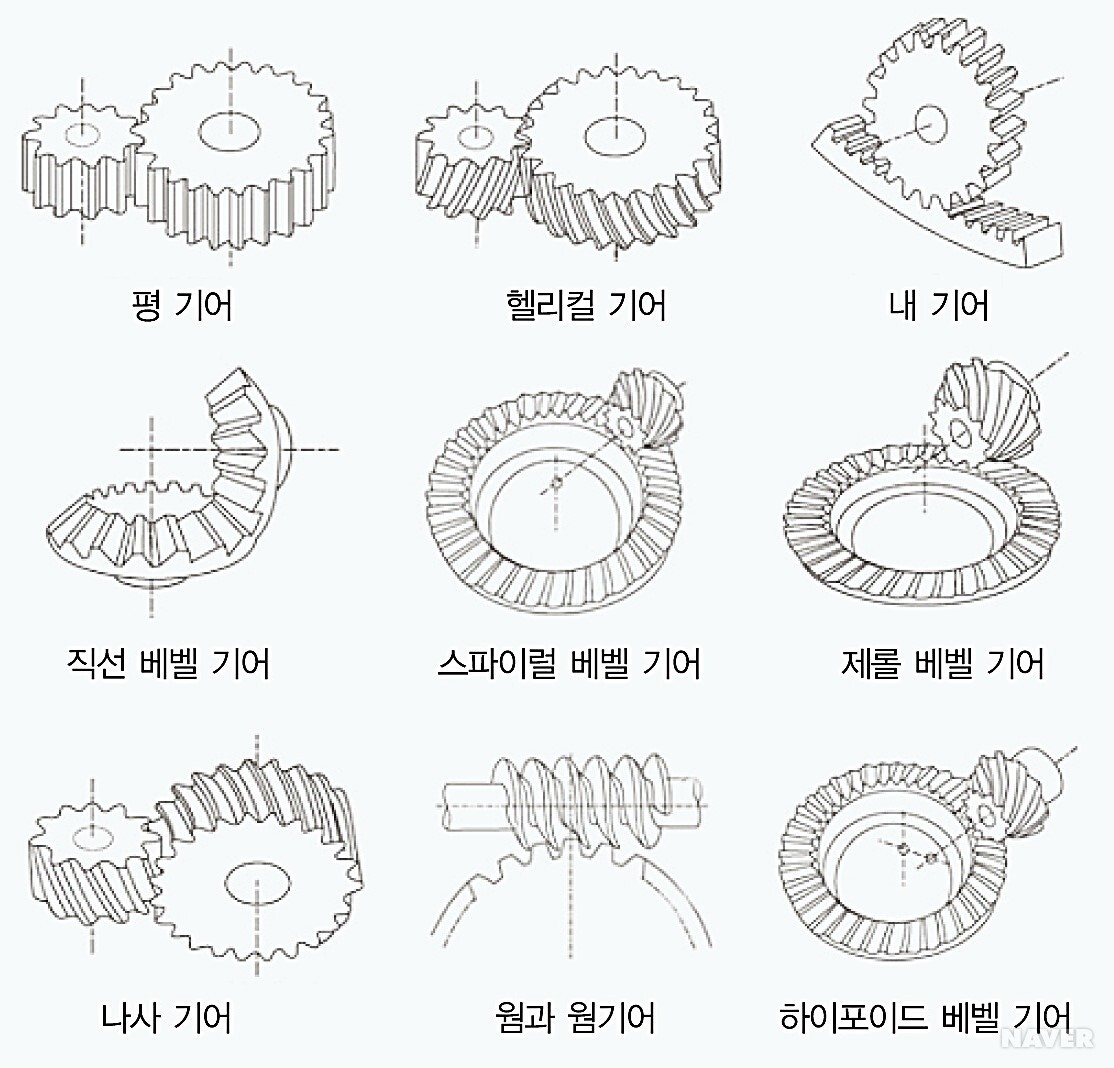
기어의 종류
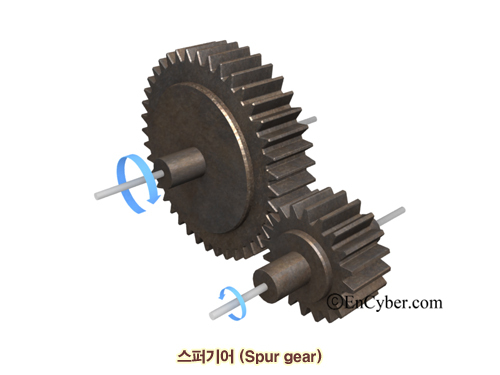
- 스퍼기어(평기어) : 두 축에 평행하게 나란히 있는 기어
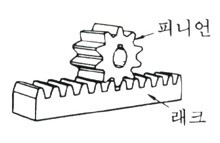
- 랙과 피니언 : 회전운동을 직선운동으로 변환하는 기어
ref : https://terms.naver.com/entry.naver?docId=1264624&cid=40942&categoryId=32335
ref : https://terms.naver.com/entry.naver?docId=1617556&cid=50321&categoryId=50321
 |
 |
- 베벨 기어 : 회전 방향을 직각으로 변환
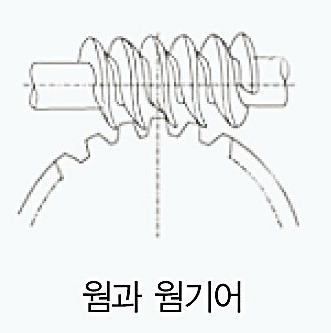
- 웜 기어 : 두 축이 직각이더라도 동일한 방향이 아닌경우 동력 전달하며 감속용
ref : https://terms.naver.com/entry.naver?docId=1101373&cid=40942&categoryId=32354
ref : https://terms.naver.com/entry.naver?docId=412755&cid=42327&categoryId=42327
 |
 |
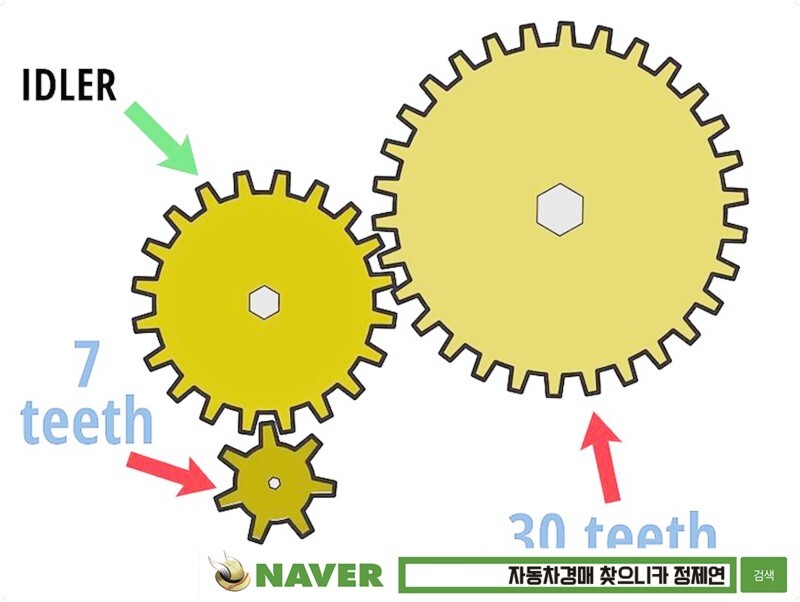
- 아이들러기어 : 두 개의 메인 기어 사이에 설치해서 위치를 조절하거나 회전방향을 반대로 할때 사용하는 기어
ref : https://m.blog.naver.com/PostView.naver?isHttpsRedirect=true&blogId=blueletteru&logNo=221583952679
'하드웨어' 카테고리의 다른 글
| automata - 3. 부품 고정 (0) | 2022.07.05 |
|---|---|
| automata - 2. 베어링, 스프링, 결합용 기계요소(볼트, 너트 등) (0) | 2022.07.04 |
| 아두이노회로만들기 - 2. 심플 우노보드 회로도, PCB 엉터리로 완성 (0) | 2022.07.02 |
| 아두이노회로만들기 - 1. 개요, 진동자, FTDI, AREF (0) | 2022.07.02 |
| 아두이노전원회로 - 9. 전원동작 전체정리 (0) | 2022.07.01 |