재ㅓㄹㅂ제ㅐ러뱆ㅇ재ㅏㅇㅈ배ㅔ
가우시안 필터
지금까지 앞에서 정규분포로 자꾸 센서 데이터나 상태를 표현했는데
지난 글에서 작성한 믿음도도 가우시안 분포로 표현해서 다루었었다.
베이즈 필터를 가우시안 분포를 이용해서 정리한게 가우시안 필터라고 할수 있음
칼만 필터는 노이즈를 가우시안 노이즈로 구현한 가우시안 필터를 구현한 것중 하나
매개변수 표현(파라미터화)
가우시안 분포 정규 분포는 보통 평균과 분산 두 수치로 표현하는데 이를 모멘트 파라미터라고 하고,
정보 행렬과 정보 벡터로 표현하는 방법을 캐노니컬 파라미터화라고 함.
정보 필터 쓸때가 아니면 보통 모멘트 표현법을 주로 사용함
다변량 가우시안분포는 다음 형태로 나타내는데
평균 mu와 공분산 sigma로 모멘트를 이용하여 표현함

칼만 필터 개요
이전 파이썬 필터 글에서 봤다시피 칼만 필터는 상태를 모멘트 매개변수화하여 표현했었음
칼만 필터는 아래의 조건들을 따르면 믿음도, 사후확률을 가우시안으로 표현가능함
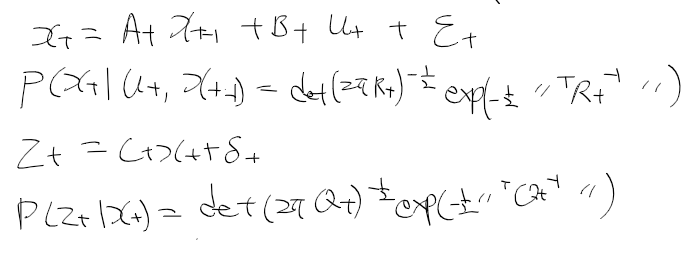
예측 과정에 사용되는 상태 전이 확률과 관측 확률이 가우시안 노이즈를 가지고(시스템/관측 행렬 + 노이즈 했던거),
* 상태 전이 함수는 시스템 행렬 A와 제어 행렬 B, 가우시안 노이즈로 구성된 선형 함수
* 관측 함수는 관측 행렬 C와 가우시안 노이즈로 구성되었음
초기 믿음도, 초기 추정치(칼만 필터할때 맨처음에 초기 평균, 공분산 준거)가 정규 분포를 따름

칼만 필터와 베이즈 필터 비교
칼만 필터는 가우시안 분포로 베이즈 필터를 구현한 것들중 하나라고 했는데
한번 비교해서 보자
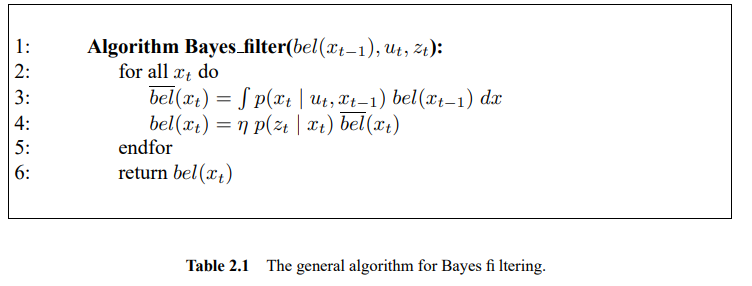
베이즈 필터에서는 x t-1에서 상태 전이 확률을 통해 t에서 예측 믿음도를 구했었다.
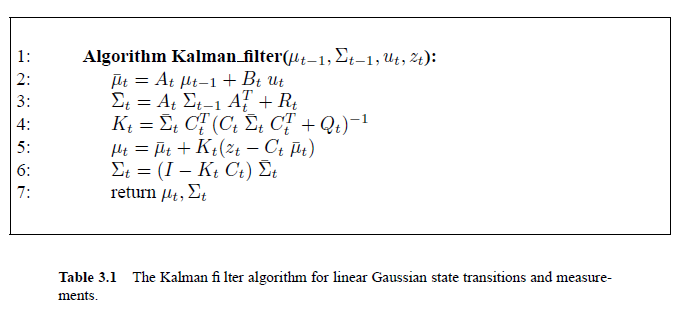
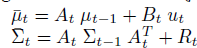
칼만 필터의 경우 (모멘트 파라미터화로 표현해서 평균과 공분산 사용) 예측 평균을 이전 상태와 제어 신호의 선형 함수로
예측 공분산을 이전 공분산에 앞뒤로 시스템 행렬을 곱해서 구해냄

칼만 필터에는 베이즈 필터에는 없는 칼만이득 계산하는 과정이 있는데
칼만 이득은 (다음 갱신과정에서 계산할) 측정 잔차(실제 측정값과 예측 측정값)를 얼마나 반영시킬지 조정하는 역활을 함

이제 관측 갱신 단계로 넘어가서보면
베이즈 필터에서는 예측 믿음도에다가 관측 확률을 곱하여 믿음도를 계산하는데
칼만 필터에서 평균은 예측 평균 + 칼만이득(실 관측값 - 예측관측값), 공분산은 칼만 이득과 예측 공분산으로 다음과 같이 계산한다.


이거 처음 봤을때 모멘트 파라미터화나 믿음도 자체를 이해못해서
베이즈 필터에서는 확률을 곱해서 계산하다가
칼만필터에서는 평균, 공분산으로 계산만하니 갑자기 왜 이래된건가 전혀 이해를 못했었는데
베이즈 필터는 로봇 상태 믿음도를 계산하기 위한 기본 컨샙이고
칼만 필터는 가우시안 분포와 선형 함수로 베이즈 필터를 실제 동작할수 있게 표현한 것 정도로 이해함.
칼만 필터를 이용한 1차원 공간에서의 위치 추정
아래의 그림은 칼만 필터로 믿음도를 예측하고 갱신하는 과정을 개념적으로 보여줌
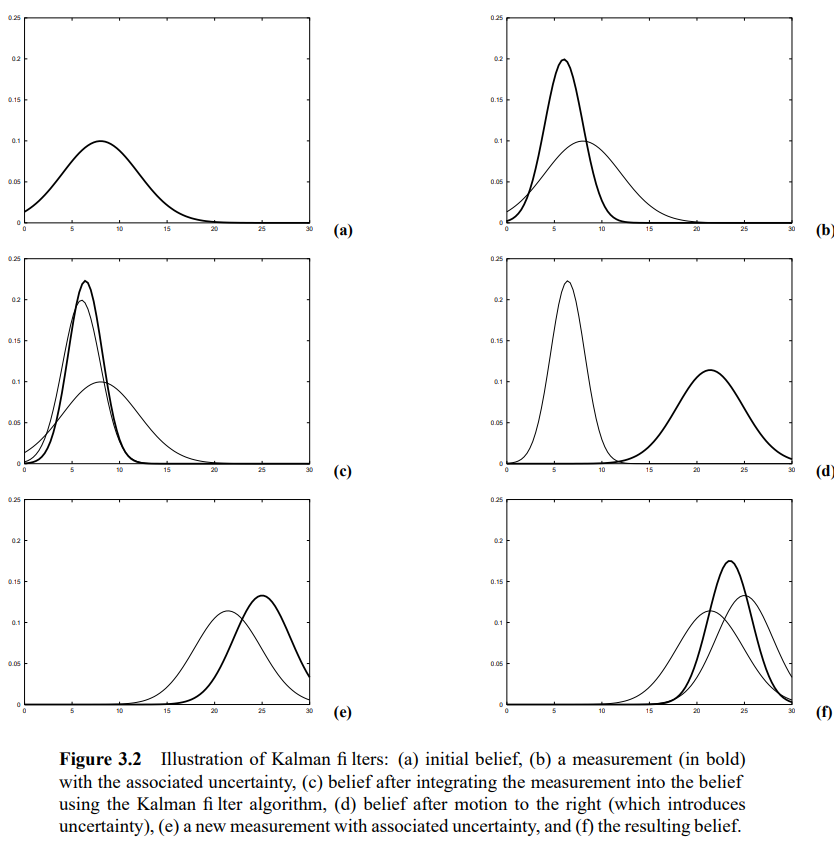
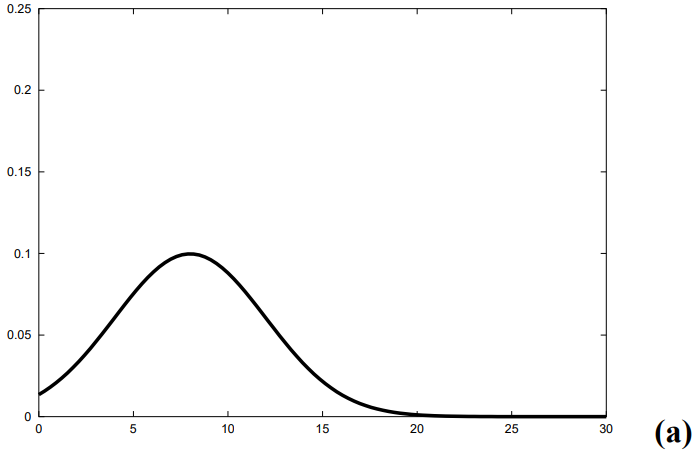
먼저 그림 a에서 가우시안 분포로 초기 믿음도를 표현해냄
초기 추정치라 뒤에 계산결과에 비해 약간 분산이 퍼진 형태로 되어있음
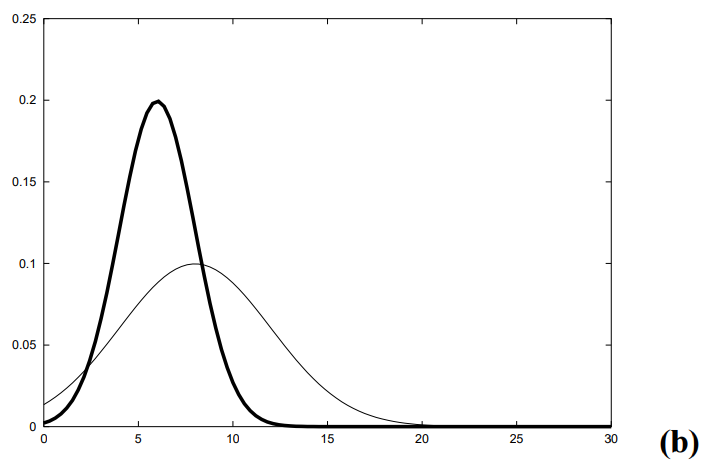
다음 그림에는 제어하지는 않았지만 먼저 관측을 해서 관측 확률을 구하였음
관측확률과 초기 확률 평균은 대충 비슷하지만, 관측 확률의 경우 분산이 작음
* 칼만 필터에서는 초기 추정치가 매우 중요함. 초기 추정치와 실 관측과 다르면 계산 잘안됨.
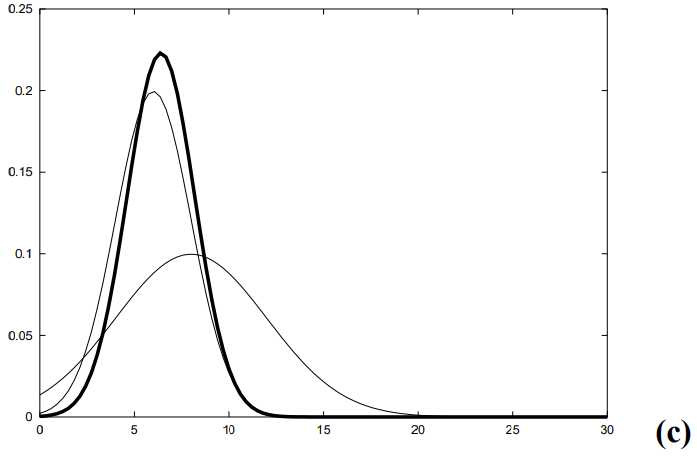
베이즈 필터에서 예측 확률(초기엔 움직이지 않았지만)과 관측 확률을 곱했던것 처럼
칼만 필터에서도 예측 믿음도에 칼만이득 x 관측잔차, 공분산 계산해서 반영시킨 결과
현재 상태, 믿음도의 불확실성이 줄어들어 확률이 더 올라감
로봇이 우측으로 이동하면서 시스템 노이즈가 누적되
불확실성이 증가하였음
제어 후 상태, 예측 믿음도의 분산이 커진걸 볼수있다.
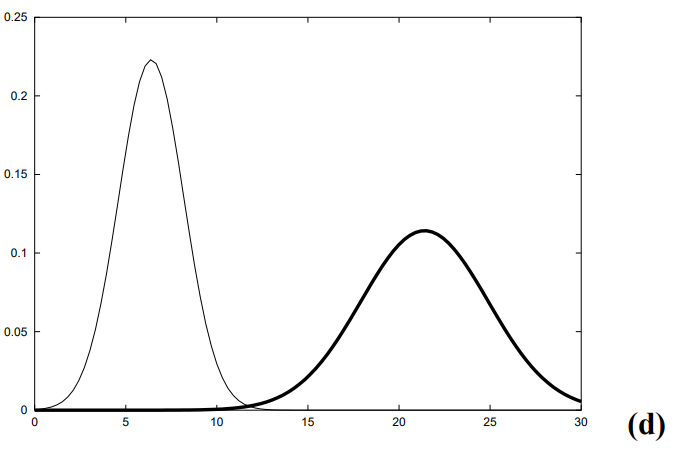
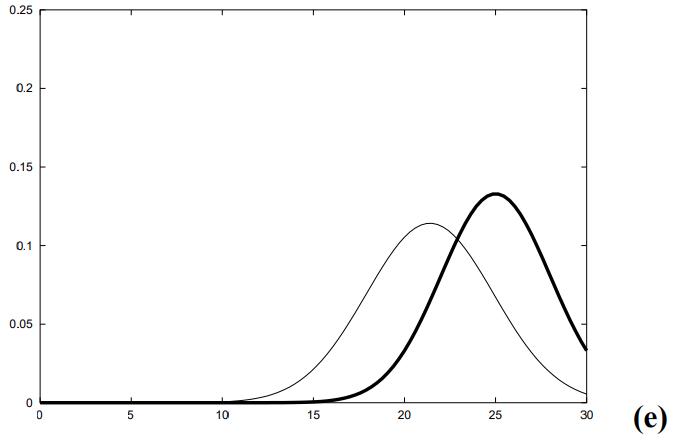
이동한 위치(예측 믿음도)는 대충 평균이 21쯤인데
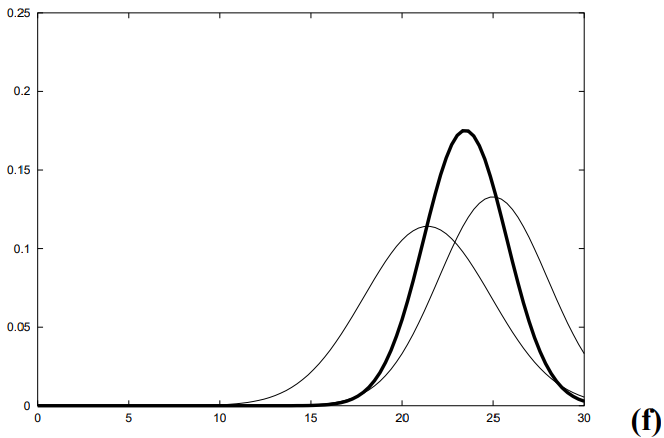
실 관측치로 봤을땐 로봇의 위치가 25쯤 있는걸로 보고 있음

이 관측치를 상태에 반영시켜 다음과 같은 사후확률, 믿음도를 구해내었음
'로보틱스' 카테고리의 다른 글
| 파이썬 로보틱스 - 5. 중단 (0) | 2023.10.27 |
|---|---|
| 파이썬 로보틱스 - 4. EKF (0) | 2023.10.12 |
| 파이썬 로보틱스 - 2. 기본 확률 이론과 로보틱스 정리 2 (0) | 2023.10.11 |
| 파이썬 로보틱스 - 1. 기본 확률 이론과 로보틱스 정리 1 (0) | 2023.10.10 |
| 파이썬 로보틱스 - 0. 시작 (0) | 2023.10.08 |