일단 이전 글에서 삽질하면서
그동안 component space를 로컬 좌표계라 오해하고
이상하게 회전했다는 사실을 알았다.
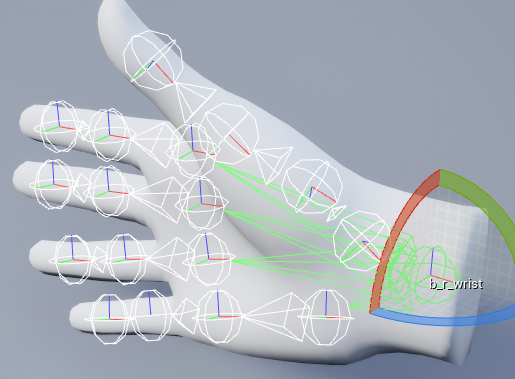
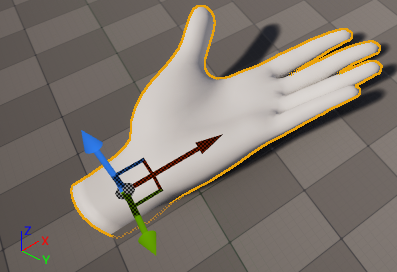
오큘러스 손은 90도 롤 회전이 되어있어
roll 회전을 풀면 이런식이 된다.
요 축을 회전해서 검지 손가락을 접도록 구상해보자
 |
 |
| 왼손 | 오른손 |
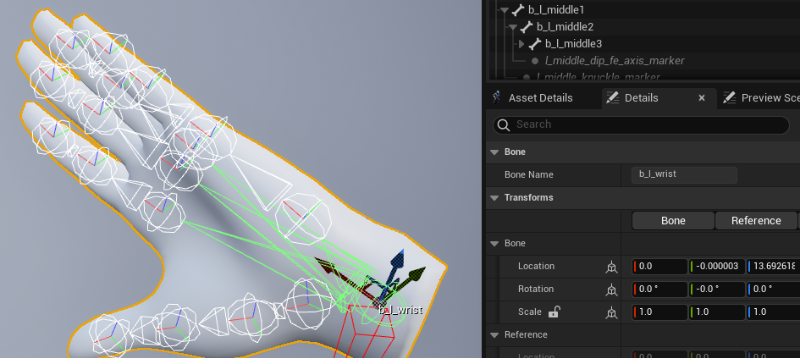
검지, 중지 약지 관절들을 로컬 rpy 0,0,0으로 설정했는데
설정안한 약지까지도 기준좌표계랑 동일한 형태를 갖고 있지만
엄지 손가락의 경우 좌표계가 회전을 했는지 뒤집어진걸 볼수있따.
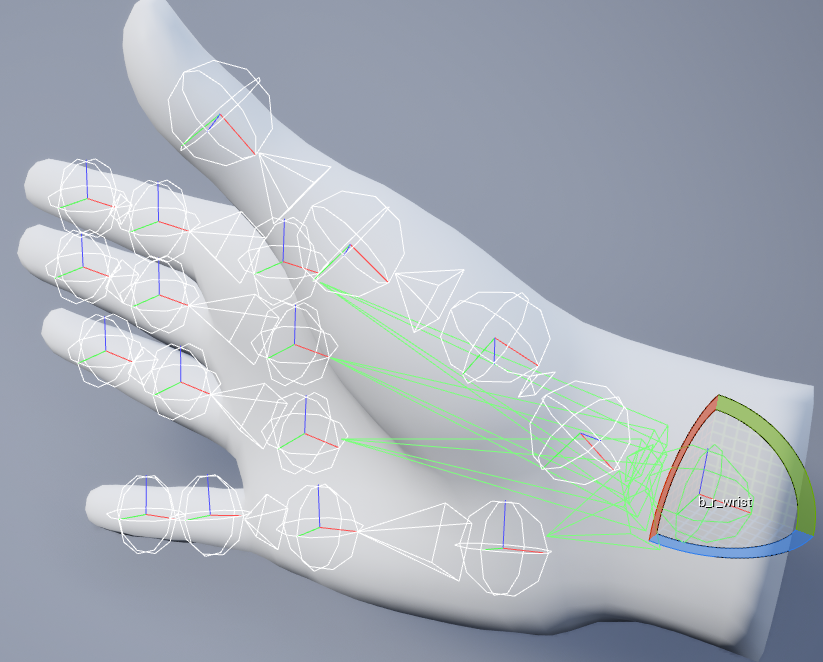
롤로 회전을 좀했는지 y축이 아래를 향하고 있음.

보니 60도 회전해있다고 하는데
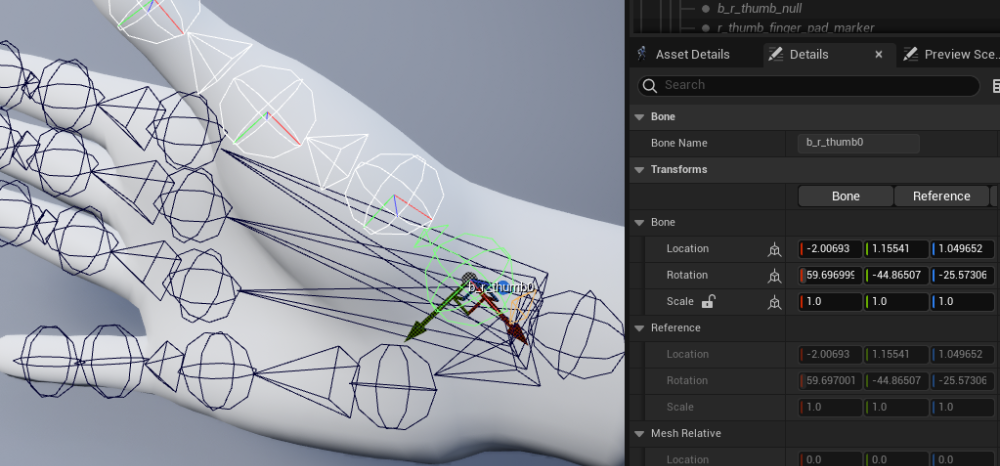
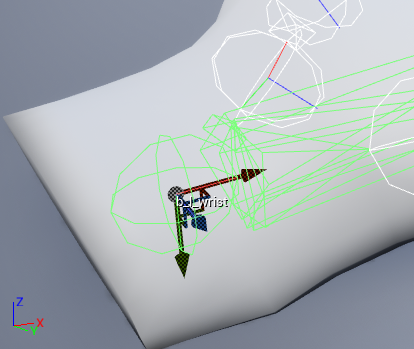
이를 0으로 고쳐서 기준 좌표계랑 맞추면 엄지손가락이 어그러질것
로컬로 x축 60도 회전한 탓에 y축이 아래를 향하고 있었지만
x축을 0도 회전으로 고치면 y축이 올라와 원래 공간 좌표계와 비슷한 방향을 향하게 된다.

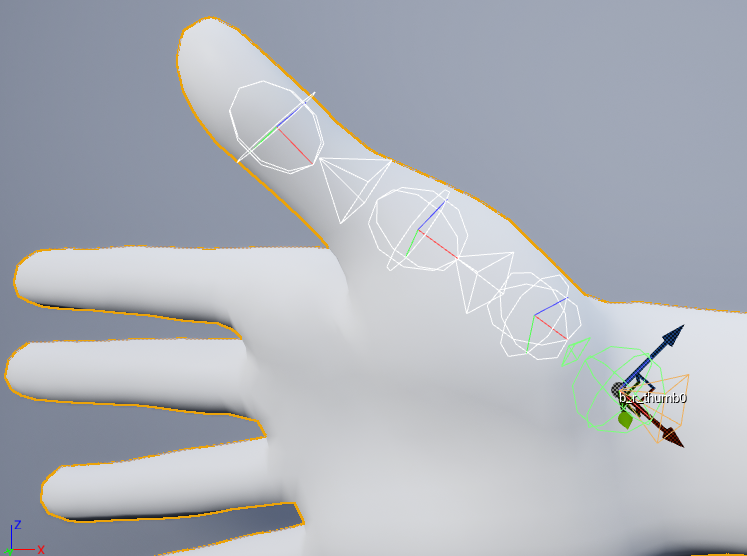
어그러질줄 알았는데 방향이 이쪽이 아니라그런가
엄지손쪽살만 좀 이동하고만다.

그래도 하위 뼈들이 뒤집혀지지 않은채 공간 좌표랑 비슷한 방향으로 나온다.
손을 쥐는 형태로 만들려 했는데 잠깐 좌표계보느라 밀렸네
그리고 나도모르는세 오른손으로 보고있엇음
왼손으로 다시보면
x롤을 0으로 만들어서 회전을 먼저 풀자
x를 풀어 0으로 만드는것 컴포넌트 공간에서 rotator를 0,0,0으로 설정하는거라 생각하면될듯
일단 기존 손을 지우고
왼손 다시 만든뒤, 회전 0,0,0 주면 월드 좌표계랑 비슷하게 나온다.
 |
 |
하지만 컴포넌트 좌표계에서 보면
롤 90도 회전이 되어있는 상태
 |
 |
손을 들어올린다고하면
월드 좌표계 기준 y축 90도 회전하면 되므로, xy 90,90하면 손이 그대로 들어올려진다.
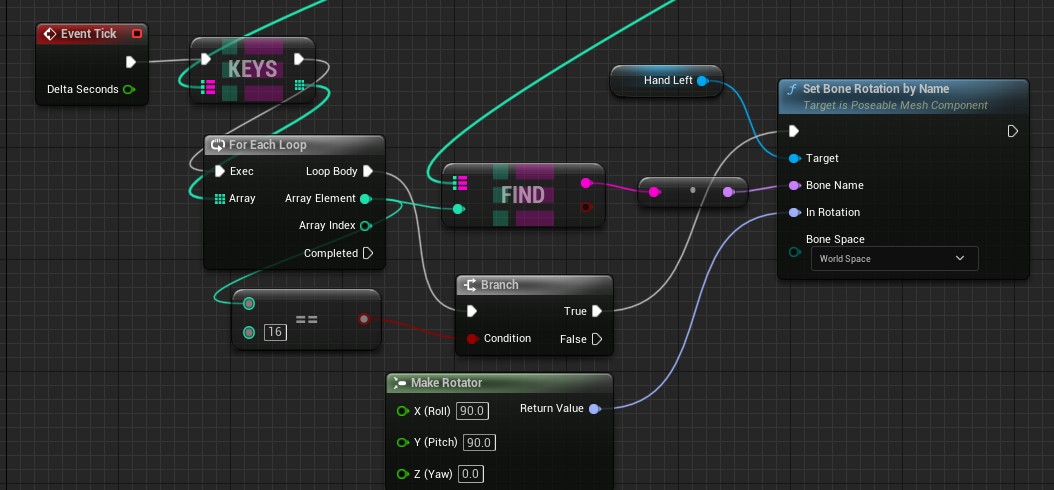

근대 생각해보니 컴포넌트 좌표계에서도 y축으로 90도 올리면되네?


지금보니 월드 공간에서 손을 회전안주니 컴포넌트 공간이랑 똑같이 나온다
차이를 보기위해
손을 z축 90도 회전시켜놓고 돌려보면될듯
월드 공간 xy 90, 90하면 위 이미지처럼 될것이고
컴포넌트 공간 xy 90,90하면 이상태에서만 손만들어질듯

생각한 대로 되었다.
이제 좀 월드 공간, 컴포넌트 공간 구분이 될랑말랑한다.
 |
 |
| 컴포넌트 공간에서 할때 | 월드 공간 기준 회전할때 |
이재 쬐까 이해됬으니
손을 손등이 보이게 놓고 다뤄보자.

결국 스켈레톤에디터에서 월드 공간 = 컴포넌트 공간 이더라
검지 50, 50, 50도씩 접는다고하면
검지1의 피치가 4이므로
검지1 피치 54, 검지2 피치 104, 검지3 피치 154하면될듯
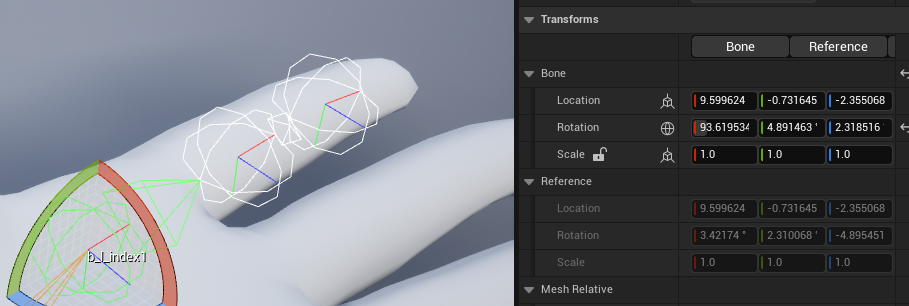
마참내 생각한데로 되었따.
 |
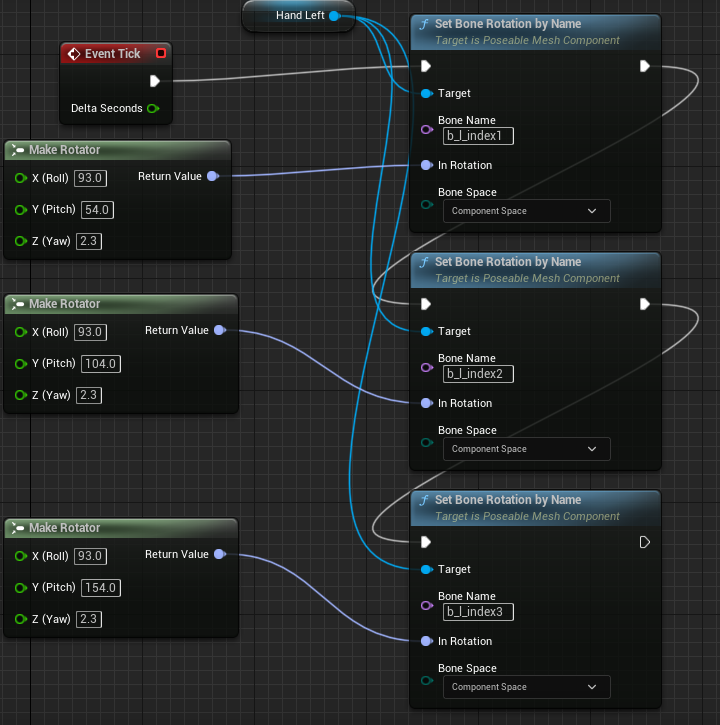 |
엄지를 제외한 나머지 손가락도 이런식으로 접어보자
편의를 위해서
1은 90, 54, 0
2는 90, 104, 0
3은 90, 154, 0 으로 설정
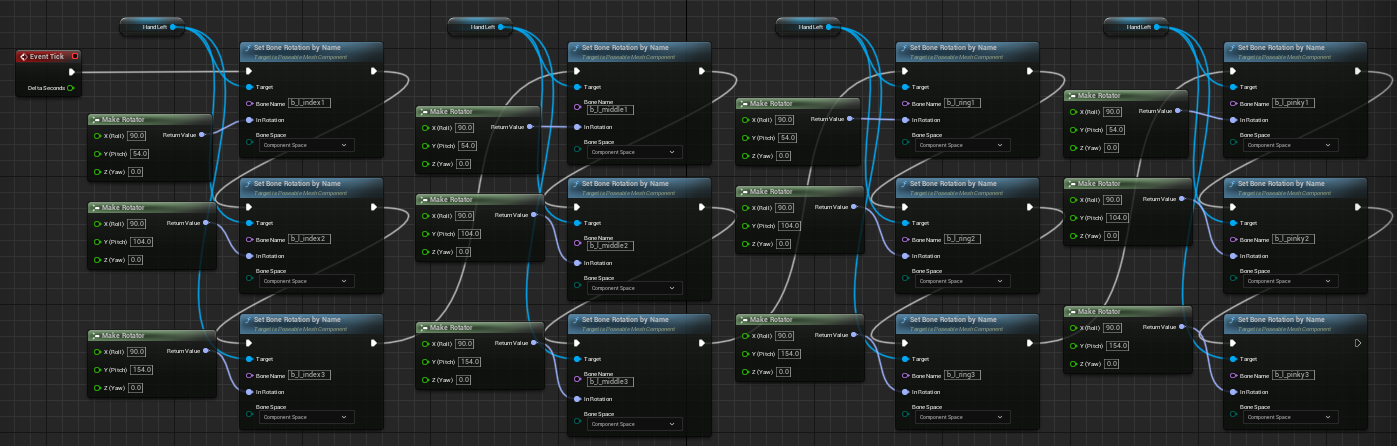
엄지를 제외한 나머지 손가락이 원하는 형태로 접혀졌다.

'컴퓨터과학 > 언리얼' 카테고리의 다른 글
| HandDesktop16 - 손 관절 가지고 놀기4 rpy 대신 좌표 다루기 구상 (0) | 2024.02.02 |
|---|---|
| HandDesktop15 - 손 관절 가지고 놀기3 손이동 구현 (0) | 2024.02.01 |
| HandDesktop13 - 손 관절 가지고 놀기 (0) | 2024.02.01 |
| HandDesktop12 - 손 관절 회전 방향 구하기(fail?) (0) | 2024.02.01 |
| HandDesktop11 - 손 메시 제어하기 (0) | 2024.01.31 |