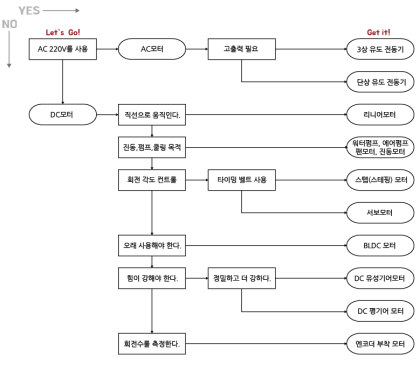
모터 개요
- DC 모터 : 소형 가전에 사용. 브러쉬에 의한 수명문제 -> BLDC 모터
- RC(remote control) 서보모터 : 완구용. PWM으로 제어 용이. Encoder 사용하기도
- 스텝 모터 : 산업용, 프린터 등 사무용 기기에 많이 사용. 홀딩 토크가 큼. 잘못 제어시 탈조
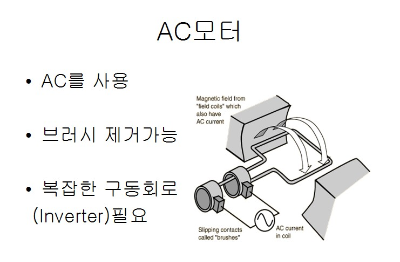
- AC 모터 : 산업용, 드라이어기, 에어컨 등 가전에 많이. 속도 제어를 위해 인버터 사용
- 서보 모터 : 산업용, 정밀 장치, 로봇 등 에 많이 씀.
 |
 |
 |
 |
 |
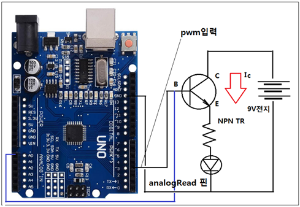
디지털 출력
- MCU 입출력 단자를 이용한 ON, OFF.
- MCU 포트는 80mA 아주 작은 전류를 내보내 TR이나 릴레이 연결해 높은 전력 장치를 ON/OFF 연결해 사용
아날로그 출력
- DAC로 아날로그 출력으로 변환 -> 연산증폭기로 증폭.
<-> 아날로그 출력 회로는 비용이 크다.
=> PWM 제어 사용

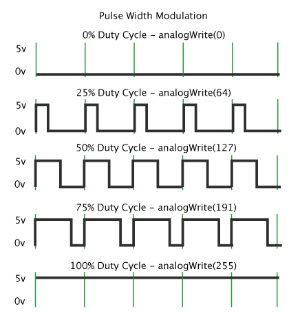
PWM
- 듀티비를 이용해 모터, 온도, 조명 등 제어
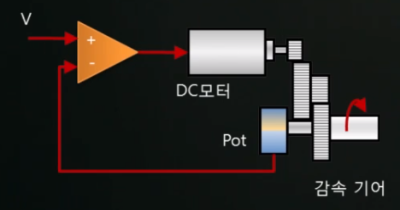
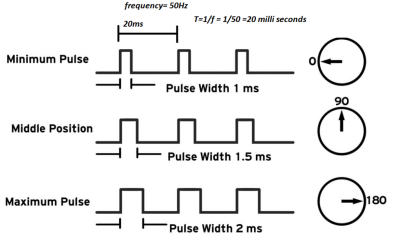
RC 서보모터
- DC 모터에 감속기어를 추가해 적절한 속도와 큰 토크를 얻음
- 토크 암의 각도를 내부 POT 센서로 제어.
HOW? 명령 각도 V와 비교해 내부적으로 feedback 제어로 위치 제어 수행
* POT 센서 : 포텐쇼미터 = 가변저항, 오디오 볼륨으로도 사용
- RC 서보모터 제어규정 : 제어 PWM 주기. 20ms 주기 내 On-duty를 0.6 ~ 2.4ms 사이로 회전각도 결정
 |
 |

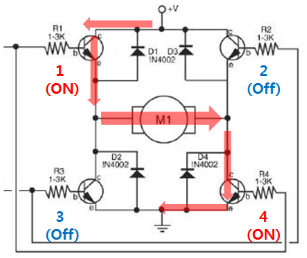
H 브리지 회로를 이용한 DC 모터 제어
- H 브리지 회로 : DC 모터의 정역 회전 제어에 사용
+ PWM 신호로 방향 뿐만 아니라 속도도 제어
'로보틱스' 카테고리의 다른 글
| 파이썬 로보틱스 - 1. 기본 확률 이론과 로보틱스 정리 1 (0) | 2023.10.10 |
|---|---|
| 파이썬 로보틱스 - 0. 시작 (0) | 2023.10.08 |
| robotics - 2. 로봇 비전 (0) | 2022.09.06 |
| robotics - 1. 로봇센서와 신호처리 (0) | 2022.09.05 |
| ROS기초튜토리얼(끝) - 15, 16. 간단한 서비스,클라이언트 코드 쓰기 + 사용하기 (0) | 2022.06.24 |