서보기구
- 위치, 자세 뿐만아니라 속도를 제어하는 기구. 로봇과 NC를 가능하게함.
서보 드라이버 시스템
- 자동 제어 : 레이다로 응용. 주파수 응답을 이용해 제어 설계에 활용
- 피드백 제어 이론 활용
- 전자 계산기 발전으로 신뢰성 향상.
- 직류 서보 구동기보다 뛰어는 AC 서보 구동기 활용
서보 종류
- AC 서보모터 : 동기기, 유도기형 AC 서보
- DC 서보 : 고정자로 영구자석, 회전자로 코일
- 스태핑 모터 : 한 회전을 스텝으로 나눈 브러쉬리스 직류 전기모터. 피드백 없이 정밀하게 위치조절가능
 |
 |
 |
| AC 서보모터 | DC 서보모터 | 스테핑모터 |
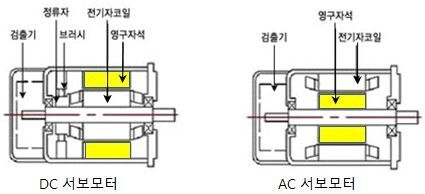
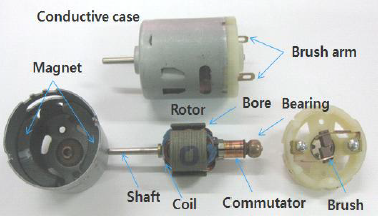
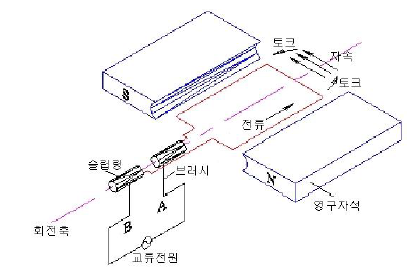
DC 서보모터 구조
- 전기자, 영구자석(계자), 브러시, 베어링, 모터케이스 등
- 브러시 : 전기자에 전류 공급 접점
- 정류자 : 전류 전환
- 전기자 : 회전력 발생을 위한 전자석
- 베어링 : 로터 회전구조 형성. 볼 베어링 or 오릴리스 메탈 씀
- 고정자축 : 자로, 기계적 지지용 원통 프레임. 프레임 내경에는 자석 부착
- 회전자축 : 회전자축과 외경에 정류자, 회전자 철심 부착. 회전자 철심 내 전기자 권선 감김.
- DC 서보모터는 토크 전류가 비례한 선형제어가 가능. 최고 속도서 정류불꽃발생. Tr을 이용한 PWM으로 구동.
AC 서보모터
- 회전자, 고정자, 센서, 프레임, 베어링, 커플링으로 구성. 필요시 + 브레이크
- 회전자 : 회전축에 영구자석이 고정된 회전계자형
- 센서 : 모터 위치, 속도 검출
- 프레임 : 고정자 고정, 자로 역활. 동손철손에의한 열 방렬 통로 기능
- 베어링 : 볼베어링 주로 씀. 급가감속 운동과 회전축 열 팽창, 탈조 방지 고려
- 원리 : DC 모터의 정류자를 슬립링으로 대체. 주파수를 변화시켜 회전 속도 변화
모터 관련 용어
- 정격 : 적합한 조건에서의 사용 한도. 정격 전압, 정격 전류, 정격 회전수, 정격 주파수 등 지정.
- 출력 (watts) = 1.027 x ( 10 - 5) x T x N ( 모터가 단위 시간에 할수있는 일 양. 회전수 x 토크)
* 1.027 x (10 - 5) 정수, T : 토크(g cm), N 회전수[rpm]
-> 정격 출력 : 지정된 전압, 주파수 조건에서 발생되는 출력으로 일반적인 모터의 출력.
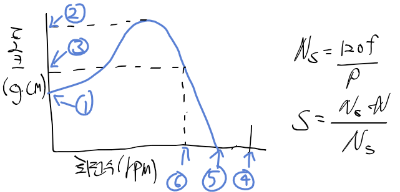
토크와 회전수
- 토크 : 회전체를 돌리기 위한 회전력. 단위 [g cm] or [kg cm] 등
- 1kg m 토크는 반경이 반경이 1m인 회전체가 직각 방향으로 1kg 힘 가할때 회전력
1) 기동 토크 : 모터가 작동할때 발생하는 회전력. 회전자 구속 회전력 or 시동토크라 함.
2) 정동 토크 : 최대 토크. 이 이상의 부하가 걸리면 모터는 정지
3) 정격 토크 : 정격 회전수일때 토크. 정격 전압이 가해질때 나오는 정격 출력
4) 동기 회전수 : 전원 주파수와 모터 극수로 결정 Ns = 120f/P(rpm)
ex) 전원 주파수 60Hz, 4극 모터-> 동기회전수 Ns = 120 x 60/ 4 = 1,800(rpm)
5) 무부하 회전수 : 출력측에 무부하로 회전시 회전수.
6) 정격 회전수 : 정격 부하를 걸떄 이상적인 회전수
7) 슬립 : 마찰 등으로 동기 회전보다 밀린 정도 ? S = (Ns - N) / Ns [Ns : 동기 회전수, N : 부하 회전수]
- 정마찰 토크 : 정지하고 있는 상태에서 부하를 홀딩하는 토크
- 허용 토크 : 운전 중 가능한 최대 토크, 정격 토크, 온도 상승, 기어 해드의 강도에 의해 제한
- 오버런 : 전원 차단 순간부터 모터 초과 회전을 각도 or 회전수로 나타낸 것
- 기어 헤드
1) 감속비 : 기어 헤드가 모터 회전수 감속하는 비율
2) 최대 허용 토크 : 기어 헤드에 걸리는 최대 부하 토크
3) 서비스 팩터 :기어 헤드 수명 추정시 사용 계수
4) 전달 효율 : 모터에 기어 헤드 접속해 토크 증폭하는 효율
5) 오버 헝 하중 : 기어 헤드 출력축에 직각으로 걸리는 하중
6) 스러스트 하중 : 기어 헤드 출력축에 축 방향으로 걸리는 하중
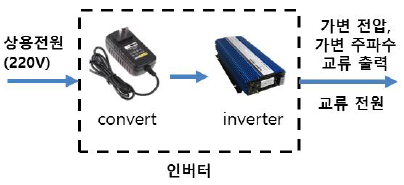
인버터
- 사이리스터, gto, msfet, igbt 등 반도체 전력 스위칭 소자와 인덕터, 캐패시터 등 필터로 직류 전원을 가변 주파수, 가변 전압의 교류원으로 변환하는 전력변환 장치
- 교류를 직류로 변환하고 반도체 소자로 스위칭하여 교류로 역변환. 스위칭 간격을 조절해 주파수를 변환시킴.
-> 전압과 주파수를 가변하여 인버터를 가변 전압 가변 주파수 VVVF Variable Voltage Variable Frequency라고도함.
- 구성 : 컨버터 부, 인버터부, 제어부로 구성.
- 기본 원리 : 상용 전원 입력 -> 컨버터(정류부)로 직류 전원 변환 -> 평활부에서 리플 제어하여 인버터부 제어 -> 교류 전력의 전압과 주파수 조절 -> 교류 전동기 회전수 제어
* 입력 전원 -> AC -> DC -> 평활 회로 -> DC -> AC -> 모터
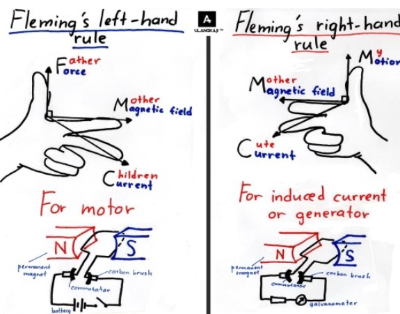
플뢰밍 왼손, 오른손 법칙
- 우발자전 : 오른손은 발전기, 왼손은 전동기
- 플뤠밍 왼손 법칙 : 모터 내부에서 로터, 회전자에 작용하는 힘의 원리 설명
- 플뤠밍의 오른손 법칙 : 일정 자계 속에 있는 도선을 외부 힘으로 움직였을때 도선에 유도 전류 흐르는 관계를 나타낸법칙
- 힘 F = B I l sin theta
- 기전력 e = B v l sin theta
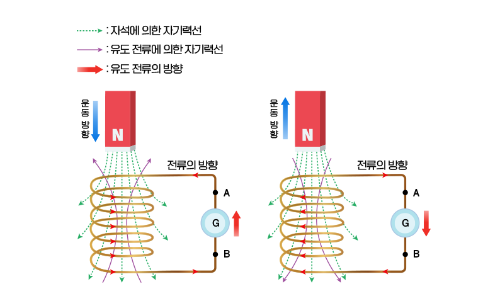
페러데이-렌츠의 전자유도법칙
- 페러데이 법칙 : 코일에 유도되는 전압(유기기전력)은 권선수 N과 코일을 통과하는 자속의 변화율 (d theta) / (d t)에 비례
- 렌츠의 법칙 : 코일에 발생하는 기전력 방향은 자속 theta의 증감과 반대방향으로 발생
=> 유기기전력 e = - N (d theta) / (d t) = -L di/dt
* N (권수) x theta(wb) = L(인덕턴스) x I(전류)
DC 모터 제어방식
- DC 모터 토크 T =K x I_a x I_f (I_a 전기자 전류, I_f 계자 전류, K 비례상수)
- 전기자 제어, 계자 제어 방식 등
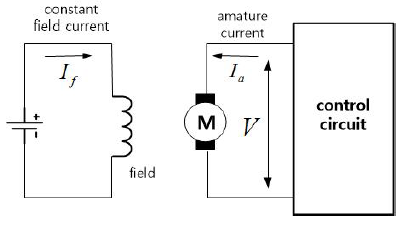
- 전기자 제어 방식 : 분권 DC 모터나 영구자석 필드 DC 모터에서 흔히 사용. 필드 전류를 일정하게 유지. 전기자에 가해지는 전압을 변화시켜 제어
- 계자 제어 방식 : 전기자 전류는 일정하게할때 토크는 계자 전류 I_f에 비례. T = K_T' x I_f (K_T'는 전기자 전류 일정할때토크상수)
 |
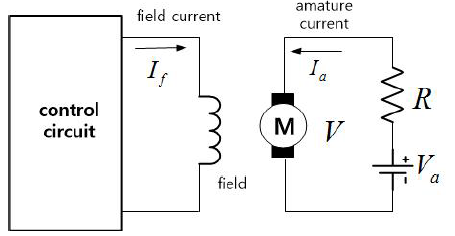 |
| 전기자 제어방식 | 계자 제어방식 |
모터 제어 기본 회로
- 모터 제어 기본 회로는 ON/OFF 회로. 기동, 정지만 제어함.
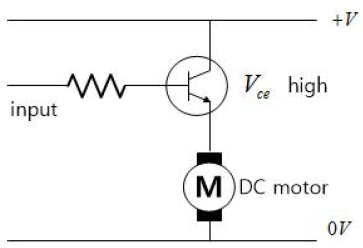
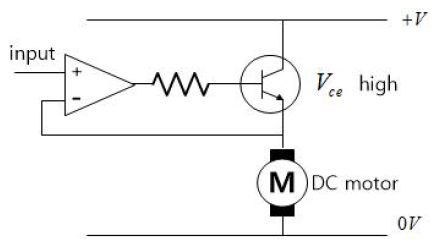
- 트랜지스터 구동(이미터 부하) : 트랜지스터 on/off로 모터 on/off 시킴. Tr 완전 포화 on으로 할수없고 Vce가커 전압손실큼
-> OP 앰프를 추가하여 부궤환으로 동작시킴. -> 속도 제어 가능
 |
 |
| 트랜지스터구동(이미터부하) | 트랜지스터 구동(OP앰프 추가) |
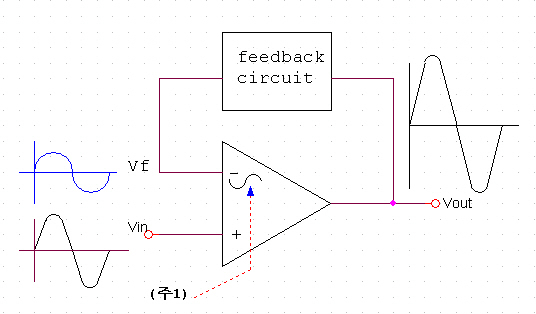
* 부 궤환
- Op amp 사용시 부궤환이 없는 경우 개방루프이득이 아주커 출력은 쉽게 포화
-> 부궤환을 사용하면 전압이득을 조절해 선형증폭기로 사용가능.
= 원하는 출력을 내도록 조절가능.
Tr Vce 같은건 정말 이해안된다
http://recipes.egloos.com/5832185
트랜지스터 - 증폭기와 스위치로의 작동개념
트랜지스터는 입력신호로 조정하는 가변저항이라고 했다. 그렇다면, 당장 한가지 의문이 생긴다. "가변저항이 어떻게 증폭기, 스위치로 작동하지?" 우리가 이 소자를 마음대로 사용하기 위해서
recipes.egloos.com
모터제어 기본회로 2
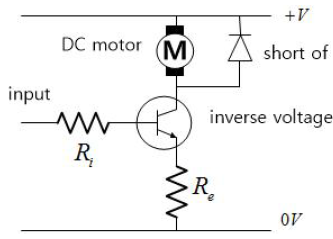
- 트랜지스터 구동(컬렉터 부하) : Tr을 완전 포화상태로 ON할수 있어 드라이브 능력이 크고, 전압 손실도 적음.
- 역기전력 처리 :Tr 이 ON 되어 모터가 회전하면서 모터 코일에 에너지가 축적 됨. Tr off시 이 에너지가 방출되어 역기전력 발생 -> 역기전력이 매우 커 Tr이 파괴될수 있으므로 역방향으로 쇼트 시켜 흘려보냄 + 다이오드를 두어 통상 전압은 안흐드로록 막음.
 |
 |
| 컬렉터부하 모터제어회로 | 역기전력처리 |
모터 정역 + 속도제어
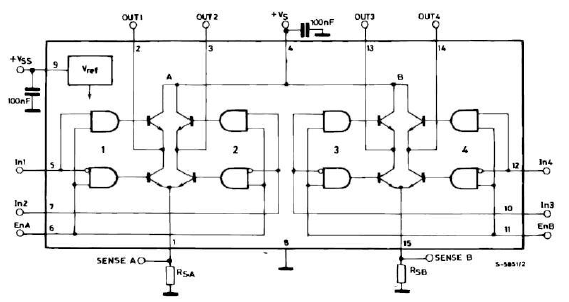
- 모터 정역 제어 : H 브리지 회로 사용. L298 모터 드라이버 모듈 사용. IN1, IN2 모터 방향, ENA, ENB 모터 ONOFF제어
- PWM을 이용한 모터 속도 제어 : L298의 EN 단자를 PWM제어를 통해 모터 속도 제어
+ 플라이휠 다이오드 : PWM로 속도 제어 시 Tr이 OFF되어도 역기전력이 다이오드를 통해 다시 들어와 동작시킴
 |
 |
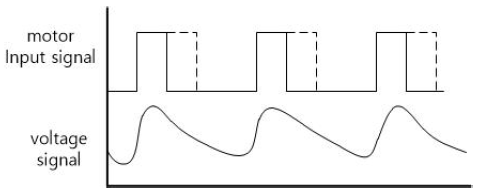 |
| H 브리지 모터 정역제어회로 | L298 IC | PWM 신호와 실제 모터에 가해지는 전압 |
모터와 제어
- 옛날에는 유 공압 기기를 이용해 제어
- 빠른 응답과 정밀 제어의 필요성으로 서보 모터를 이용한 제어 시스템이 만들어짐
- DC 모터가 잘 사용되었으나 브러시 문제, 선형 제어성을 위해 AC 서보모터로 발전
자동 제어 시스템
- 크게 개회로, 폐회로 제어 시스템으로 구분
- 개회로 제어 시스템 : 신호 궤환없는 제어 시스템. 간단해서 많이 씀.
ex) 단상 유도 전동기를 이용한 컨베이어 구동 시스템, 정확한 제어 신호 없거나 전원 입력만으로 구동하는 시스템
- 혼합 제어 시스템 : 컨베이어 속도를 제어하는 유도전동기에 인버터 없이 속도 제어 시. 인버터 내부에는 전류 제어하도록 폐루프 제어 이용 -> 컨베이어 부하에 대해선 개루프, 인버터 내부에선 폐루프 제어 실시
- 폐루프 제어 : 신호를 궤환받아 오차를 줄이도록 구성. 피드백 신호를 - 연산 -> 연산 증폭기에서 제어신호 생성 -> 전력 변환기로 서보모터에 공급.
* 센서 대신 서보모터에서 발생하는 전압, 전류를 사용하여 제어하기도 함.
 |
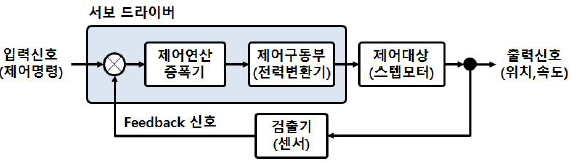 |
| 개루프 제어계 | 폐루프 제어계 |
서보모터 제어 시스템
- 토크 제어 시스템, 속도 제어 시스템, 위치 제어 시스템으로 구분 가능. 각각 폐루프 제어 구성.
- 서보모터는 모터에 입력되는 전력(전압, 전류)를 제어하여 원하는 동작하도록 제어.
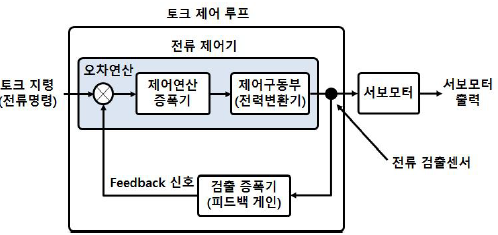
- 토크 제어형 서보 시스템 : 토크를 일정하게 유지. 모터에 인가되는 부하 크기에 따라 회전수 조절하는 경우 사용.
+ 토크 지령(서보모터에 인가되는 전류 명령), 모터 토크는 전류에 비례하므로 전류를 제어하여 토크 제어
+ 오차출력 = 토크 지령 - 피드백 신호(현재 전류) 을 제어 연산 증폭기(보통 PID 연산 제어기)에 인가되어 사용.
=> 토크 제어 루프는 서보모터까진 둘러 싸진 않음 = 서보모터를 개루프 제어 = 부하랑 상관없이 일정 토크 유지
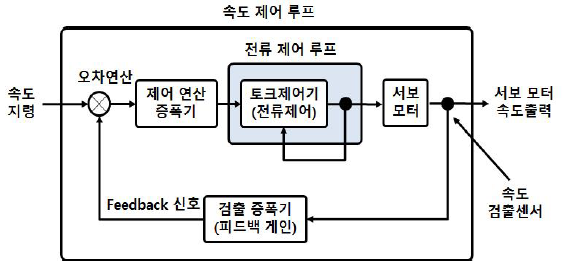
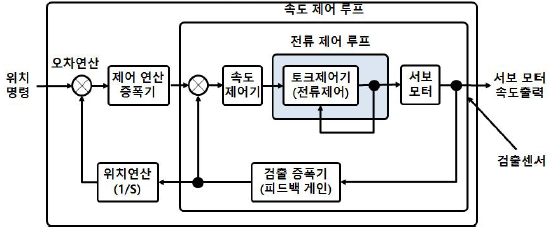
속도 제어 서보 시스템
- 서보 모터를 포함한 폐루프 제어 시스템
=> 서보모터 속도를 검출하도록 서보 드라이버 외부에서 서보모터 회전축과 연결되어 구성.
- 속도 검출 센서로 타코 제네레이터(아날로그 전압신호 출력이므로 ADC 필요) or 광학식 엔코더 사용
- 속도 입력과 센서 출력의 편차를 내부의 전류 제어 루프로 보내 속도 제어
위치 제어 서보 시스템
- 위치 제어(원하는 회전각 얻기) = 토크 제어 루프 + 속도 제어 루프 => 위치 제어 루프는 최외각 제어 루프
- 현재 속도를 적분해 현재 위치 제어 신호로 만들고, 위치 명령 입력과 편차로 제어
각 서보모터 장단점
| DC 서보모터 | 동기기 AC 서보모터 | 유도기 AC 서보모터 | |
| 장점 | 큰 기동토크 큰 토크 좋은 효율 제어성 좋다 속도 제어 범위가 큼 저렴한 비용 |
브러시가 없다 정류 한계 x 고신뢰성 고속, 고토크 방열 좋다. |
브러시가 없다 정류 한계 x 자석 x 고속 높은 토크 회전 검출기 불필요 |
| 단점 | 브러시 마찰 신뢰성 떨어짐 정류 한계 |
시스템 복잡고가 전기적 시정수가 큼 |
시스템 복잡 고가 전기적 시정수가 큼 |
'하드웨어' 카테고리의 다른 글
| 로봇HW - 4. 센서 신호처리부 (0) | 2022.09.15 |
|---|---|
| 로봇HW - 3. 입출력 HW (0) | 2022.09.14 |
| 로봇HW - 1. MCU HW (0) | 2022.09.08 |
| 아두이노회로만들기 - 3. 베터리 쓰기, 내부 클럭 쓰기, LED 점멸 (0) | 2022.07.19 |
| automata - 6. 기계 요소의 모션 (0) | 2022.07.05 |