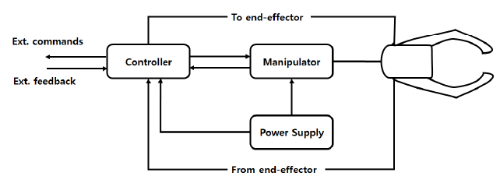
산업용 로봇 시스템 기본 구조
- 구성 : 매니퓰레이터(관절로 이뤄진 로봇팔), 엔드 이펙터(그리퍼 등), 파워 서플라이, 컨트롤러(제어, 인터페이스입출력)
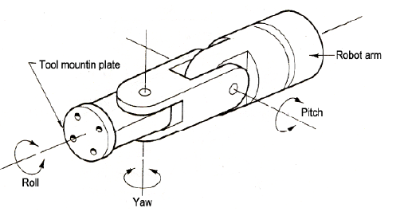
- 매니퓰레이터 : 자유도(각축은 1개의 자유도)에 따라 관절(조인트) 운동으로 팔끝을 이동시킴.산업용로봇은 4~6개자유도
- 엔드 이팩터 : 매니퓰레이터에 부착되어 작업 수행. 기계적으로 열리고 닫히는식이면 그리퍼, 공구/부착물은 공정공구
- 파워 서플라이 : 로봇 제어에 필요한 에너지 공급. 전기, 유압, 공압 등
- 제어기 로봇 운동, 시퀀스를 제어하도록 통신, 정보 처리함.
 |
 |
| 로봇 기본구조 | 매니퓰레이터 |
로봇 기구부 구조
- 링크 : 로봇의 형상에 따라 다양. 철강, 알루미늄, 듀랄류민 등으로 제작
- 조인트 : 링크와 링크를 연결하는 부품. 직교 좌표 로봇에서는 리니어 모터, 스칼라/다관절 로봇에선 서보모터 사용
- 로봇 기구부 : 구동을 위한 구동계와 구동계를 지지하는 구조물로 구성. 정밀 감속기(볼스크루, 하모닉드라이브 등)과 기계요소(기어, 타이밍벨트, 핀, 키 등)로 이뤄짐
- 정밀 감속기 : 볼 스크루(회전운동 -> 직선운동), 하모닉 드라이브(단순,작음,가벼우나 강성이 약해 소형로봇 팔, 손목 구동에 사용) , RV 감속기(강성이 크고, 정밀한 운동에 사용)
- 기계 요소 : 로봇 팔-손, 감속기와 모터 연결. 핀(감속기-모터축 연결, 작은동력전달), 키(감속기-모터축연결, 핀보다큰동력), 스플라인(키보다 큰동력 전달), 타이밍벨트(양쪽 풀리에 연결, 빠른 동작 작업), 기어(강성이커, 큰동력 전달), 베어링(로봇 팔, 손과 모터축 지지, 회전운도 원할하게함)

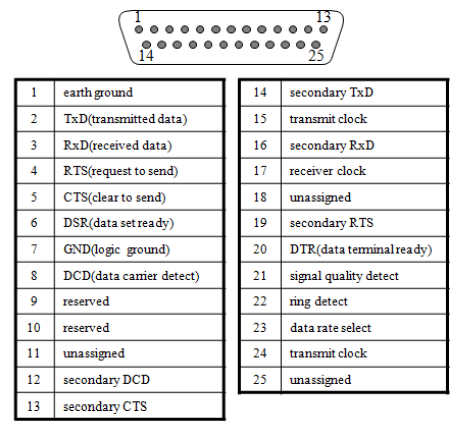
로봇 입출력 인터페이스
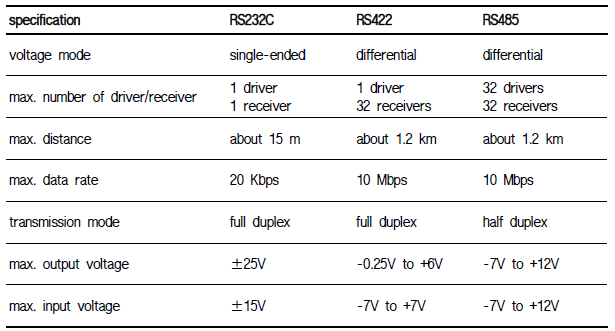
- RS232 : 시리얼 통신을 위한 인터페이스 표준. A,B,C 세 버전중 C버전 RS232C가 많이씀.
* -3~-12V는 1, +3~+12V 0으로 인식, 20Kbps, 전송거리 15m 이내
- RS422와 RS485 : 2개의 전송매체의 전압차로 0, 1인식(차동 인코딩) -> 두 장치간 GND 전압이 바뀌어도 영향x
* RS422 : 4회선(전이중), +-7V
* RS485 : 2회선(반이중), +-12V로 전압범위가 커짐
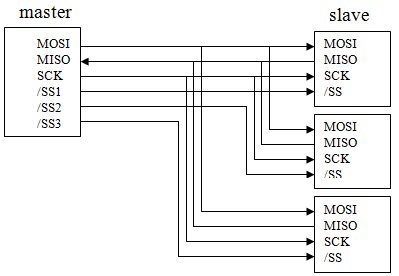
- SPI : MOSI, MISO, SCK, SS 4선으로 이뤄짐. 전이중. 고속 직렬 데이터 송수신. 슬레이브가 많으면 복잡해져서비추
로봇 통신 네트워크 CAN
- 차량내 센서, 엑추에이터, ECU간 통신을 위해 개발.
- 메시지 내용과 우선순위에 따라 ID를 할당해 구분하는 주소지정방식.
- 한 노드가 메시지 보내면 다른 노드가 관련있는지 보고 판단하여 받음.
- 모든 노드가 버스 마스터, 버스가 비었을때 보냄.
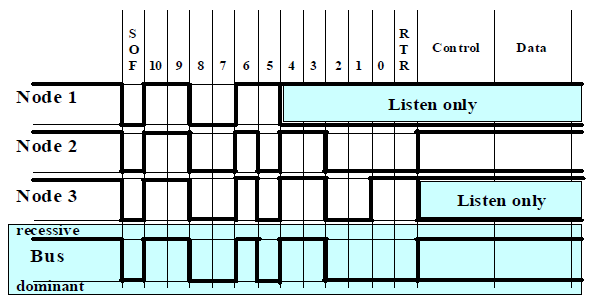
- non-destructive bitwise arbitration을 이용한 메시지 충돌방지 : 메시지 ID 비트를 비교(비트와이즈 비교). 버스 레벨 비트와 가장 가까운 노드 2의 메시지가 우선적으로 보내짐
'하드웨어' 카테고리의 다른 글
| 로봇HW - 4. 센서 신호처리부 (0) | 2022.09.15 |
|---|---|
| 로봇HW - 2. 로봇 액추에이터 (0) | 2022.09.14 |
| 로봇HW - 1. MCU HW (0) | 2022.09.08 |
| 아두이노회로만들기 - 3. 베터리 쓰기, 내부 클럭 쓰기, LED 점멸 (0) | 2022.07.19 |
| automata - 6. 기계 요소의 모션 (0) | 2022.07.05 |