방금 파이썬으로 블라즈 팜, 핸즈 하기전에 어제까지만해도
미디어파이프파이토치 코드 기준으로 따라가려다가 (논문에서 설명한걸 따라간거겟지만)
팜의 회전방향 고려해서 어파인변환하고 엄청 지저분해졌는데
굳이 어파인 변환까지 하지않아도
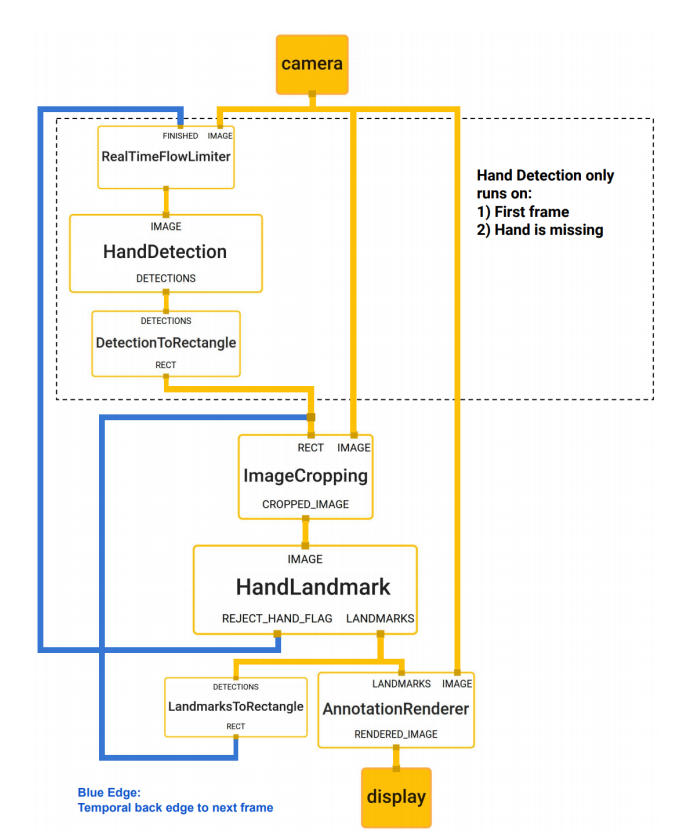
색상영역로 손추출 -> 블라즈핸드로도 충분히 손자세를 잘 잡아낼수 있었다.
그런 이유로 블라즈를 다 날리고 깔끔하게 다시 정리해볼 생각
한참 해맨 문제 정리
1. 느린 웹캠 시작시간
그리고 왜 시작이 느린가 싶더니
노트북 웹캠은 빨리 시작하고, usb 웹캠은 시작이 늦었다.
스트리밍 해상도가 높을떈 더 느렸고
노트북 웹캠을 쓰는게 나을듯
2. 손 검출이 잘 안되던 이유
블라즈 팜할때 RGB가 아닌 BGR 상태를 입력으로 준게 문제였다.
패딩이 문제가 아니라.
블라즈 갈아엎기
기존에 하면서 엉망이된
블라즈 다시 시작
// Fill out your copyright notice in the Description page of Project Settings.
#pragma once
#include "PreOpenCVHeaders.h"
#include <opencv2/opencv.hpp>
#include "PostOpenCVHeaders.h"
#include "CoreMinimal.h"
/**
*
*/
class HANDDESKTOP_API Blaze
{
public:
Blaze();
~Blaze();
cv::dnn::Net blazePalm;
cv::dnn::Net blazeHand;
// var and funcs for blazepalm
struct PalmDetection {
float ymin;
float xmin;
float ymax;
float xmax;
cv::Point2d kp_arr[7];
float score;
};
int blazeHandSize = 256;
int blazePalmSize = 128;
float palmMinScoreThresh = 0.4;
float palmMinNMSThresh = 0.2;
int palmMinNumKeyPoints = 7;
void ResizeAndPad(
cv::Mat& srcimg, cv::Mat& img256,
cv::Mat& img128, float& scale, cv::Scalar& pad
);
std::vector<PalmDetection> PredictPalmDetections(cv::Mat& img);
PalmDetection GetPalmDetection(cv::Mat regressor, cv::Mat classificator,
int stride, int anchor_count, int column, int row, int anchor, int offset);
float sigmoid(float x);
std::vector<PalmDetection> DenormalizePalmDetections(std::vector<PalmDetection> detections, int width, int height, cv::Scalar pad);
void DrawPalmDetections(cv::Mat& img, std::vector<Blaze::PalmDetection> denormDets);
std::vector<PalmDetection> FilteringDets(std::vector<PalmDetection> detections, int width, int height);
};
패딩은 문제가 없었고, 색변환이 문제였으므로
리사이즈앤패드 맨뒤에 bgr2rgb 추가하였음.
// Fill out your copyright notice in the Description page of Project Settings.
#include "Blaze.h"
Blaze::Blaze()
{
this->blazePalm = cv::dnn::readNet("c:/blazepalm_old.onnx");
this->blazeHand = cv::dnn::readNet("c:/blazehand.onnx");
}
Blaze::~Blaze()
{
}
void Blaze::ResizeAndPad(
cv::Mat& srcimg, cv::Mat& img256,
cv::Mat& img128, float& scale, cv::Scalar& pad
)
{
float h1, w1;
int padw, padh;
cv::Size size0 = srcimg.size();
if (size0.height >= size0.width) {
h1 = 256;
w1 = 256 * size0.width / size0.height;
padh = 0;
padw = static_cast<int>(256 - w1);
scale = size0.width / static_cast<float>(w1);
}
else {
h1 = 256 * size0.height / size0.width;
w1 = 256;
padh = static_cast<int>(256 - h1);
padw = 0;
scale = size0.height / static_cast<float>(h1);
}
//UE_LOG(LogTemp, Log, TEXT("scale value: %f, size0.height: %d, size0.width : %d, h1 : %f"), scale, size0.height, size0.width, h1);
int padh1 = static_cast<int>(padh / 2);
int padh2 = static_cast<int>(padh / 2) + static_cast<int>(padh % 2);
int padw1 = static_cast<int>(padw / 2);
int padw2 = static_cast<int>(padw / 2) + static_cast<int>(padw % 2);
pad = cv::Scalar(static_cast<float>(padh1 * scale), static_cast<float>(padw1 * scale));
cv::resize(srcimg, img256, cv::Size(w1, h1));
cv::copyMakeBorder(img256, img256, padh1, padh2, padw1, padw2, cv::BORDER_CONSTANT, cv::Scalar(0, 0, 0));
cv::cvtColor(img256, img256, cv::COLOR_BGR2RGB);
cv::resize(img256, img128, cv::Size(128, 128));
cv::cvtColor(img128, img128, cv::COLOR_BGR2RGB);
}
std::vector<Blaze::PalmDetection> Blaze::PredictPalmDetections(cv::Mat& img)
{
std::vector<Blaze::PalmDetection> beforeNMSResults;
std::vector<Blaze::PalmDetection> afterNMSResults;
std::vector<float> scores;
std::vector<int> indices;
std::vector<cv::Rect> boundingBoxes;
cv::Mat inputImg;
cv::cvtColor(img, inputImg, cv::COLOR_BGR2RGB);
cv::Mat tensor;
inputImg.convertTo(tensor, CV_32F, 1 / blazePalmSize, 0);
cv::Mat blob = cv::dnn::blobFromImage(tensor, 1.0, tensor.size(), 0, false, false, CV_32F);
std::vector<cv::String> outNames(2);
outNames[0] = "regressors";
outNames[1] = "classificators";
blazePalm.setInput(blob);
std::vector<cv::Mat> outputs;
blazePalm.forward(outputs, outNames);
cv::Mat classificator = outputs[0];
cv::Mat regressor = outputs[1];
for (int y = 0; y < 16; ++y) {
for (int x = 0; x < 16; ++x) {
for (int a = 0; a < 2; ++a) {
PalmDetection res = GetPalmDetection(regressor, classificator, 8, 2, x, y, a, 0);
if (res.score != 0)
{
beforeNMSResults.push_back(res);
cv::Point2d startPt = cv::Point2d(res.xmin, res.ymin);
cv::Point2d endPt = cv::Point2d(res.xmax, res.ymax);
boundingBoxes.push_back(cv::Rect(startPt, endPt));
scores.push_back(res.score);
}
}
}
}
for (int y = 0; y < 8; ++y) {
for (int x = 0; x < 8; ++x) {
for (int a = 0; a < 6; ++a) {
PalmDetection res = GetPalmDetection(regressor, classificator, 16, 6, x, y, a, 512);
if (res.score != 0)
{
beforeNMSResults.push_back(res);
cv::Point2d startPt = cv::Point2d(res.xmin, res.ymin);
cv::Point2d endPt = cv::Point2d(res.xmax, res.ymax);
boundingBoxes.push_back(cv::Rect(startPt, endPt));
scores.push_back(res.score);
}
}
}
}
cv::dnn::NMSBoxes(boundingBoxes, scores, palmMinScoreThresh, palmMinNMSThresh, indices);
for (int i = 0; i < indices.size(); i++) {
int idx = indices[i];
afterNMSResults.push_back(beforeNMSResults[idx]);
}
return afterNMSResults;
}
Blaze::PalmDetection Blaze::GetPalmDetection(cv::Mat regressor, cv::Mat classificator,
int stride, int anchor_count, int column, int row, int anchor, int offset) {
Blaze::PalmDetection res;
int index = (int(row * 128 / stride) + column) * anchor_count + anchor + offset;
float origin_score = regressor.at<float>(0, index, 0);
float score = sigmoid(origin_score);
if (score < palmMinScoreThresh) return res;
float x = classificator.at<float>(0, index, 0);
float y = classificator.at<float>(0, index, 1);
float w = classificator.at<float>(0, index, 2);
float h = classificator.at<float>(0, index, 3);
x += (column + 0.5) * stride - w / 2;
y += (row + 0.5) * stride - h / 2;
res.ymin = (y) / blazePalmSize;
res.xmin = (x) / blazePalmSize;
res.ymax = (y + h) / blazePalmSize;
res.xmax = (x + w) / blazePalmSize;
if ((res.ymin < 0) || (res.xmin < 0) || (res.xmax > 1) || (res.ymax > 1)) return res;
res.score = score;
std::vector<cv::Point2d> kpts;
for (int key_id = 0; key_id < palmMinNumKeyPoints; key_id++)
{
float kpt_x = classificator.at<float>(0, index, 4 + key_id * 2);
float kpt_y = classificator.at<float>(0, index, 5 + key_id * 2);
kpt_x += (column + 0.5) * stride;
kpt_x = kpt_x / blazePalmSize;
kpt_y += (row + 0.5) * stride;
kpt_y = kpt_y / blazePalmSize;
//UE_LOG(LogTemp, Log, TEXT("kpt id(%d) : (%f, %f)"), key_id, kpt_x, kpt_y);
res.kp_arr[key_id] = cv::Point2d(kpt_x, kpt_y);
}
return res;
}
float Blaze::sigmoid(float x) {
return 1 / (1 + exp(-x));
}
std::vector<Blaze::PalmDetection> Blaze::DenormalizePalmDetections(std::vector<Blaze::PalmDetection> detections, int width, int height, cv::Scalar pad)
{
std::vector<Blaze::PalmDetection> denormDets;
int scale = 0;
if (width > height)
scale = width;
else
scale = height;
for (auto& det : detections)
{
Blaze::PalmDetection denormDet;
denormDet.ymin = det.ymin * scale - pad[0];
denormDet.xmin = det.xmin * scale - pad[1];
denormDet.ymax = det.ymax * scale - pad[0];
denormDet.xmax = det.xmax * scale - pad[1];
denormDet.score = det.score;
for (int i = 0; i < palmMinNumKeyPoints; i++)
{
cv::Point2d pt_new = cv::Point2d(det.kp_arr[i].x * scale - pad[1], det.kp_arr[i].y * scale - pad[0]);
//UE_LOG(LogTemp, Log, TEXT("denorm kpt id(%d) : (%f, %f)"), i, pt_new.x, pt_new.y);
denormDet.kp_arr[i] = pt_new;
}
denormDets.push_back(denormDet);
}
return denormDets;
}
void Blaze::DrawPalmDetections(cv::Mat& img, std::vector<Blaze::PalmDetection> denormDets)
{
for (auto& denormDet : denormDets)
{
cv::Point2d startPt = cv::Point2d(denormDet.xmin, denormDet.ymin);
cv::Point2d endPt = cv::Point2d(denormDet.xmax, denormDet.ymax);
cv::rectangle(img, cv::Rect(startPt, endPt), cv::Scalar(255, 0, 0), 1);
for (int i = 0; i < palmMinNumKeyPoints; i++)
cv::circle(img, denormDet.kp_arr[i], 5, cv::Scalar(255, 0, 0), -1);
std::string score_str = std::to_string(static_cast<int>(denormDet.score * 100))+ "%";
cv::putText(img, score_str, cv::Point(startPt.x, startPt.y - 20), cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 255), 2);
}
}
std::vector<Blaze::PalmDetection> Blaze::FilteringDets(std::vector<Blaze::PalmDetection> detections, int width, int height)
{
std::vector<Blaze::PalmDetection> filteredDets;
for (auto& denormDet : detections)
{
cv::Point2d startPt = cv::Point2d(denormDet.xmin, denormDet.ymin);
if (startPt.x < 10 || startPt.y < 10)
continue;
if (startPt.x > width || startPt.y > height)
continue;
int w = denormDet.xmax - denormDet.xmin;
int y = denormDet.ymax - denormDet.ymin;
if ((w * y < 40 * 40 )|| (w * y > (width * 0.7) * (height * 0.7)))
continue;
filteredDets.push_back(denormDet);
}
return filteredDets;
}
언리얼에선 확인하기 힘들어서 따로 c++로 코드 빼서 정리중
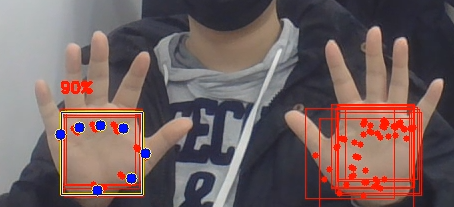
cvt color 시점때문에 손검출이 잘안되던걸 찾아서 수정했으나
손이 1개밖에 검출되지 않는다. 2개 안되는 원인 찾아야함.
#include <opencv2/opencv.hpp>
// var and funcs for blazepalm
struct PalmDetection {
float ymin;
float xmin;
float ymax;
float xmax;
cv::Point2d kp_arr[7];
float score;
};
int blazeHandSize = 256;
int blazePalmSize = 128;
float palmMinScoreThresh = 0.4;
float palmMinNMSThresh = 0.2;
int palmMinNumKeyPoints = 7;
void ResizeAndPad(
cv::Mat& srcimg, cv::Mat& img256,
cv::Mat& img128, float& scale, cv::Scalar& pad
);
std::vector<PalmDetection> PredictPalmDetections(cv::Mat& img);
PalmDetection GetPalmDetection(cv::Mat regressor, cv::Mat classificator,
int stride, int anchor_count, int column, int row, int anchor, int offset);
float sigmoid(float x);
std::vector<PalmDetection> DenormalizePalmDetections(std::vector<PalmDetection> detections, int width, int height, cv::Scalar pad);
void DrawPalmDetections(cv::Mat& img, std::vector<PalmDetection> denormDets);
std::vector<PalmDetection> FilteringDets(std::vector<PalmDetection> detections, int width, int height);
cv::dnn::Net blazePalm = cv::dnn::readNetFromONNX("c:/blazepalm_old.onnx");
int webcamWidth = 640;
int webcamHeight = 480;
cv::Mat img256;
cv::Mat img128;
float scale;
cv::Scalar pad;
int main() {
cv::Mat frame;
cv::VideoCapture cap(0);
if (!cap.isOpened()) {
std::cout << "Failed to open camera" << std::endl;
return -1;
}
while (true) {
bool ret = cap.read(frame);
if (!ret)
{
break;
}
ResizeAndPad(frame, img256, img128, scale, pad);
//UE_LOG(LogTemp, Log, TEXT("scale value: %f, pad value: (%f, %f)"), scale, pad[0], pad[1]);
std::vector<PalmDetection> normDets = PredictPalmDetections(img128);
std::vector<PalmDetection> denormDets = DenormalizePalmDetections(normDets, webcamWidth, webcamHeight, pad);
std::vector<PalmDetection> filteredDets = FilteringDets(denormDets, webcamWidth, webcamHeight);
std::string dets_size_str = "filtered dets : " + std::to_string(filteredDets.size()) + ", norm dets : " + std::to_string(normDets.size()) + ", denorm dets : " + std::to_string(denormDets.size());
cv::putText(frame, dets_size_str, cv::Point(30, 30), cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(255, 0, 0), 2);
DrawPalmDetections(frame, filteredDets);
cv::imshow("Camera Streaming", frame);
cv::imshow("img256", img256);
cv::imshow("img128", img128);
if (cv::waitKey(1) == 'q') {
break;
}
}
cap.release();
cv::destroyAllWindows();
return 0;
}
void ResizeAndPad(
cv::Mat& srcimg, cv::Mat& img256,
cv::Mat& img128, float& scale, cv::Scalar& pad
)
{
float h1, w1;
int padw, padh;
cv::Size size0 = srcimg.size();
if (size0.height >= size0.width) {
h1 = 256;
w1 = 256 * size0.width / size0.height;
padh = 0;
padw = static_cast<int>(256 - w1);
scale = size0.width / static_cast<float>(w1);
}
else {
h1 = 256 * size0.height / size0.width;
w1 = 256;
padh = static_cast<int>(256 - h1);
padw = 0;
scale = size0.height / static_cast<float>(h1);
}
//UE_LOG(LogTemp, Log, TEXT("scale value: %f, size0.height: %d, size0.width : %d, h1 : %f"), scale, size0.height, size0.width, h1);
int padh1 = static_cast<int>(padh / 2);
int padh2 = static_cast<int>(padh / 2) + static_cast<int>(padh % 2);
int padw1 = static_cast<int>(padw / 2);
int padw2 = static_cast<int>(padw / 2) + static_cast<int>(padw % 2);
pad = cv::Scalar(static_cast<float>(padh1 * scale), static_cast<float>(padw1 * scale));
cv::resize(srcimg, img256, cv::Size(w1, h1));
cv::copyMakeBorder(img256, img256, padh1, padh2, padw1, padw2, cv::BORDER_CONSTANT, cv::Scalar(0, 0, 0));
cv::resize(img256, img128, cv::Size(128, 128));
cv::cvtColor(img256, img256, cv::COLOR_BGR2RGB);
cv::cvtColor(img128, img128, cv::COLOR_BGR2RGB);
}
std::vector<PalmDetection> PredictPalmDetections(cv::Mat& img)
{
std::vector<PalmDetection> beforeNMSResults;
std::vector<PalmDetection> afterNMSResults;
std::vector<float> scores;
std::vector<int> indices;
std::vector<cv::Rect> boundingBoxes;
cv::Mat tensor;
img.convertTo(tensor, CV_32F);
tensor = tensor / 127.5 - 1;
cv::Mat blob = cv::dnn::blobFromImage(tensor, 1.0, tensor.size(), 0, false, false, CV_32F);
std::vector<cv::String> outNames(2);
outNames[0] = "regressors";
outNames[1] = "classificators";
blazePalm.setInput(blob);
std::vector<cv::Mat> outputs;
blazePalm.forward(outputs, outNames);
cv::Mat classificator = outputs[0];
cv::Mat regressor = outputs[1];
for (int y = 0; y < 16; ++y) {
for (int x = 0; x < 16; ++x) {
for (int a = 0; a < 2; ++a) {
PalmDetection res = GetPalmDetection(regressor, classificator, 8, 2, x, y, a, 0);
if (res.score != 0)
{
beforeNMSResults.push_back(res);
cv::Point2d startPt = cv::Point2d(res.xmin, res.ymin);
cv::Point2d endPt = cv::Point2d(res.xmax, res.ymax);
boundingBoxes.push_back(cv::Rect(startPt, endPt));
scores.push_back(res.score);
}
}
}
}
for (int y = 0; y < 8; ++y) {
for (int x = 0; x < 8; ++x) {
for (int a = 0; a < 6; ++a) {
PalmDetection res = GetPalmDetection(regressor, classificator, 16, 6, x, y, a, 512);
if (res.score != 0)
{
beforeNMSResults.push_back(res);
cv::Point2d startPt = cv::Point2d(res.xmin, res.ymin);
cv::Point2d endPt = cv::Point2d(res.xmax, res.ymax);
boundingBoxes.push_back(cv::Rect(startPt, endPt));
scores.push_back(res.score);
}
}
}
}
cv::dnn::NMSBoxes(boundingBoxes, scores, palmMinScoreThresh, palmMinNMSThresh, indices);
for (int i = 0; i < indices.size(); i++) {
int idx = indices[i];
afterNMSResults.push_back(beforeNMSResults[idx]);
}
return afterNMSResults;
}
PalmDetection GetPalmDetection(cv::Mat regressor, cv::Mat classificator,
int stride, int anchor_count, int column, int row, int anchor, int offset) {
PalmDetection res;
int index = (int(row * 128 / stride) + column) * anchor_count + anchor + offset;
float origin_score = regressor.at<float>(0, index, 0);
float score = sigmoid(origin_score);
if (score < palmMinScoreThresh) return res;
float x = classificator.at<float>(0, index, 0);
float y = classificator.at<float>(0, index, 1);
float w = classificator.at<float>(0, index, 2);
float h = classificator.at<float>(0, index, 3);
x += (column + 0.5) * stride - w / 2;
y += (row + 0.5) * stride - h / 2;
res.ymin = (y) / blazePalmSize;
res.xmin = (x) / blazePalmSize;
res.ymax = (y + h) / blazePalmSize;
res.xmax = (x + w) / blazePalmSize;
if ((res.ymin < 0) || (res.xmin < 0) || (res.xmax > 1) || (res.ymax > 1)) return res;
res.score = score;
std::vector<cv::Point2d> kpts;
for (int key_id = 0; key_id < palmMinNumKeyPoints; key_id++)
{
float kpt_x = classificator.at<float>(0, index, 4 + key_id * 2);
float kpt_y = classificator.at<float>(0, index, 5 + key_id * 2);
kpt_x += (column + 0.5) * stride;
kpt_x = kpt_x / blazePalmSize;
kpt_y += (row + 0.5) * stride;
kpt_y = kpt_y / blazePalmSize;
//UE_LOG(LogTemp, Log, TEXT("kpt id(%d) : (%f, %f)"), key_id, kpt_x, kpt_y);
res.kp_arr[key_id] = cv::Point2d(kpt_x, kpt_y);
}
return res;
}
float sigmoid(float x) {
return 1 / (1 + exp(-x));
}
std::vector<PalmDetection> DenormalizePalmDetections(std::vector<PalmDetection> detections, int width, int height, cv::Scalar pad)
{
std::vector<PalmDetection> denormDets;
int scale = 0;
if (width > height)
scale = width;
else
scale = height;
for (auto& det : detections)
{
PalmDetection denormDet;
denormDet.ymin = det.ymin * scale - pad[0];
denormDet.xmin = det.xmin * scale - pad[1];
denormDet.ymax = det.ymax * scale - pad[0];
denormDet.xmax = det.xmax * scale - pad[1];
denormDet.score = det.score;
for (int i = 0; i < palmMinNumKeyPoints; i++)
{
cv::Point2d pt_new = cv::Point2d(det.kp_arr[i].x * scale - pad[1], det.kp_arr[i].y * scale - pad[0]);
//UE_LOG(LogTemp, Log, TEXT("denorm kpt id(%d) : (%f, %f)"), i, pt_new.x, pt_new.y);
denormDet.kp_arr[i] = pt_new;
}
denormDets.push_back(denormDet);
}
return denormDets;
}
void DrawPalmDetections(cv::Mat& img, std::vector<PalmDetection> denormDets)
{
for (auto& denormDet : denormDets)
{
cv::Point2d startPt = cv::Point2d(denormDet.xmin, denormDet.ymin);
cv::Point2d endPt = cv::Point2d(denormDet.xmax, denormDet.ymax);
cv::rectangle(img, cv::Rect(startPt, endPt), cv::Scalar(255, 0, 0), 1);
for (int i = 0; i < palmMinNumKeyPoints; i++)
cv::circle(img, denormDet.kp_arr[i], 5, cv::Scalar(255, 0, 0), -1);
std::string score_str = std::to_string(static_cast<int>(denormDet.score * 100)) + "%";
cv::putText(img, score_str, cv::Point(startPt.x, startPt.y - 20), cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 255), 2);
}
}
std::vector<PalmDetection> FilteringDets(std::vector<PalmDetection> detections, int width, int height)
{
std::vector<PalmDetection> filteredDets;
for (auto& denormDet : detections)
{
cv::Point2d startPt = cv::Point2d(denormDet.xmin, denormDet.ymin);
if (startPt.x < 10 || startPt.y < 10)
continue;
if (startPt.x > width || startPt.y > height)
continue;
int w = denormDet.xmax - denormDet.xmin;
int y = denormDet.ymax - denormDet.ymin;
if ((w * y < 40 * 40) || (w * y > (width * 0.7) * (height * 0.7)))
continue;
filteredDets.push_back(denormDet);
}
return filteredDets;
}
자꾸 NMS 결과가 1개밖에 안나와서 최종 박스가 1개밖에 안나왔다.
후보 박스들은 많은데
원인 계속 해매다보니
NMS때 사용하는 박스 좌표들이 0 ~ 1로 정규화되어있어 너무 작았기 때문
-> 입력 해상도 128 을 곱해준 결과 정상적으로 나옴
따로 만든 예제 코드
#include <opencv2/opencv.hpp>
// var and funcs for blazepalm
struct PalmDetection {
float ymin;
float xmin;
float ymax;
float xmax;
cv::Point2d kp_arr[7];
float score;
};
int blazeHandSize = 256;
int blazePalmSize = 128;
float palmMinScoreThresh = 0.4;
float palmMinNMSThresh = 0.4;
int palmMinNumKeyPoints = 7;
void ResizeAndPad(
cv::Mat& srcimg, cv::Mat& img256,
cv::Mat& img128, float& scale, cv::Scalar& pad
);
std::vector<PalmDetection> PredictPalmDetections(cv::Mat& img, cv::Mat& frame);
PalmDetection GetPalmDetection(cv::Mat regressor, cv::Mat classificator,
int stride, int anchor_count, int column, int row, int anchor, int offset);
float sigmoid(float x);
std::vector<PalmDetection> DenormalizePalmDetections(std::vector<PalmDetection> detections, int width, int height, cv::Scalar pad);
void DrawPalmDetections(cv::Mat& img, std::vector<PalmDetection> denormDets);
std::vector<PalmDetection> FilteringDets(std::vector<PalmDetection> detections, int width, int height);
cv::dnn::Net blazePalm = cv::dnn::readNetFromONNX("c:/blazepalm_old.onnx");
int webcamWidth = 640;
int webcamHeight = 480;
cv::Mat img256;
cv::Mat img128;
float scale;
cv::Scalar pad;
int main() {
cv::Mat frame;
cv::VideoCapture cap(0);
if (!cap.isOpened()) {
std::cout << "Failed to open camera" << std::endl;
return -1;
}
while (true) {
bool ret = cap.read(frame);
if (!ret)
{
break;
}
ResizeAndPad(frame, img256, img128, scale, pad);
//UE_LOG(LogTemp, Log, TEXT("scale value: %f, pad value: (%f, %f)"), scale, pad[0], pad[1]);
std::vector<PalmDetection> normDets = PredictPalmDetections(img128, frame);
std::vector<PalmDetection> denormDets = DenormalizePalmDetections(normDets, webcamWidth, webcamHeight, pad);
std::vector<PalmDetection> filteredDets = FilteringDets(denormDets, webcamWidth, webcamHeight);
std::string dets_size_str = "filtered dets : " + std::to_string(filteredDets.size()) + ", norm dets : " + std::to_string(normDets.size()) + ", denorm dets : " + std::to_string(denormDets.size());
cv::putText(frame, dets_size_str, cv::Point(30, 30), cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(255, 0, 0), 2);
DrawPalmDetections(frame, filteredDets);
cv::imshow("Camera Streaming", frame);
cv::imshow("img256", img256);
cv::imshow("img128", img128);
if (cv::waitKey(1) == 'q') {
break;
}
}
cap.release();
cv::destroyAllWindows();
return 0;
}
void ResizeAndPad(
cv::Mat& srcimg, cv::Mat& img256,
cv::Mat& img128, float& scale, cv::Scalar& pad
)
{
float h1, w1;
int padw, padh;
cv::Size size0 = srcimg.size();
if (size0.height >= size0.width) {
h1 = 256;
w1 = 256 * size0.width / size0.height;
padh = 0;
padw = static_cast<int>(256 - w1);
scale = size0.width / static_cast<float>(w1);
}
else {
h1 = 256 * size0.height / size0.width;
w1 = 256;
padh = static_cast<int>(256 - h1);
padw = 0;
scale = size0.height / static_cast<float>(h1);
}
//UE_LOG(LogTemp, Log, TEXT("scale value: %f, size0.height: %d, size0.width : %d, h1 : %f"), scale, size0.height, size0.width, h1);
int padh1 = static_cast<int>(padh / 2);
int padh2 = static_cast<int>(padh / 2) + static_cast<int>(padh % 2);
int padw1 = static_cast<int>(padw / 2);
int padw2 = static_cast<int>(padw / 2) + static_cast<int>(padw % 2);
pad = cv::Scalar(static_cast<float>(padh1 * scale), static_cast<float>(padw1 * scale));
cv::resize(srcimg, img256, cv::Size(w1, h1));
cv::copyMakeBorder(img256, img256, padh1, padh2, padw1, padw2, cv::BORDER_CONSTANT, cv::Scalar(0, 0, 0));
cv::resize(img256, img128, cv::Size(128, 128));
cv::cvtColor(img256, img256, cv::COLOR_BGR2RGB);
cv::cvtColor(img128, img128, cv::COLOR_BGR2RGB);
}
std::vector<PalmDetection> PredictPalmDetections(cv::Mat& img, cv::Mat& frame)
{
std::vector<PalmDetection> beforeNMSResults;
std::vector<PalmDetection> afterNMSResults;
std::vector<float> scores;
std::vector<int> indices;
std::vector<cv::Rect> boundingBoxes;
cv::Mat tensor;
img.convertTo(tensor, CV_32F);
tensor = tensor / 127.5 - 1;
cv::Mat blob = cv::dnn::blobFromImage(tensor, 1.0, tensor.size(), 0, false, false, CV_32F);
std::vector<cv::String> outNames(2);
outNames[0] = "regressors";
outNames[1] = "classificators";
blazePalm.setInput(blob);
std::vector<cv::Mat> outputs;
blazePalm.forward(outputs, outNames);
cv::Mat classificator = outputs[0];
cv::Mat regressor = outputs[1];
for (int y = 0; y < 16; ++y) {
for (int x = 0; x < 16; ++x) {
for (int a = 0; a < 2; ++a) {
PalmDetection res = GetPalmDetection(regressor, classificator, 8, 2, x, y, a, 0);
if (res.score != 0)
{
beforeNMSResults.push_back(res);
cv::Point2d startPt = cv::Point2d(res.xmin * 128, res.ymin * 128);
cv::Point2d endPt = cv::Point2d(res.xmax * 128, res.ymax * 128);
boundingBoxes.push_back(cv::Rect(startPt, endPt));
scores.push_back(res.score);
}
}
}
}
for (int y = 0; y < 8; ++y) {
for (int x = 0; x < 8; ++x) {
for (int a = 0; a < 6; ++a) {
PalmDetection res = GetPalmDetection(regressor, classificator, 16, 6, x, y, a, 512);
if (res.score != 0)
{
beforeNMSResults.push_back(res);
cv::Point2d startPt = cv::Point2d(res.xmin * 128, res.ymin * 128);
cv::Point2d endPt = cv::Point2d(res.xmax * 128, res.ymax * 128);
boundingBoxes.push_back(cv::Rect(startPt, endPt));
scores.push_back(res.score);
}
}
}
}
std::vector<PalmDetection> denormBeforeNMSResults = DenormalizePalmDetections(beforeNMSResults, 640, 480, cv::Scalar(80, 0));
for (auto& denormBeforeNMSResult : denormBeforeNMSResults)
{
cv::Point2d startPt = cv::Point2d(denormBeforeNMSResult.xmin, denormBeforeNMSResult.ymin);
cv::Point2d endPt = cv::Point2d(denormBeforeNMSResult.xmax, denormBeforeNMSResult.ymax);
cv::rectangle(frame, cv::Rect(startPt, endPt), cv::Scalar(0, 0, 255), 1);
std::string score_str = std::to_string(static_cast<int>(denormBeforeNMSResult.score * 100));
cv::putText(frame, score_str, cv::Point(startPt.x, startPt.y - 10), cv::FONT_HERSHEY_SIMPLEX, 0.4, cv::Scalar(0, 0, 255), 2);
for (int i = 0; i < palmMinNumKeyPoints; i++)
cv::circle(frame, denormBeforeNMSResult.kp_arr[i], 3, cv::Scalar(0, 0, 255), -1);
}
cv::dnn::NMSBoxes(boundingBoxes, scores, palmMinScoreThresh, palmMinNMSThresh, indices);
std::cout << "index check : " << std::endl;
for (auto& index : indices)
{
std::cout << index << std::endl;
}
std::cout << std::endl << std::endl;
for (int i = 0; i < indices.size(); i++) {
int idx = indices[i];
afterNMSResults.push_back(beforeNMSResults[idx]);
}
std::vector<PalmDetection> denormAfterNMSResults = DenormalizePalmDetections(afterNMSResults, 640, 480, cv::Scalar(80, 0));
for (auto& denormAfterNMSResult : denormAfterNMSResults)
{
cv::Point2d startPt = cv::Point2d(denormAfterNMSResult.xmin, denormAfterNMSResult.ymin);
cv::Point2d endPt = cv::Point2d(denormAfterNMSResult.xmax, denormAfterNMSResult.ymax);
cv::rectangle(frame, cv::Rect(startPt, endPt), cv::Scalar(0, 255, 255), 2);
for (int i = 0; i < palmMinNumKeyPoints; i++)
cv::circle(frame, denormAfterNMSResult.kp_arr[i], 6, cv::Scalar(0, 255, 255), -1);
}
return afterNMSResults;
}
PalmDetection GetPalmDetection(cv::Mat regressor, cv::Mat classificator,
int stride, int anchor_count, int column, int row, int anchor, int offset) {
PalmDetection res;
int index = (int(row * 128 / stride) + column) * anchor_count + anchor + offset;
float origin_score = regressor.at<float>(0, index, 0);
float score = sigmoid(origin_score);
if (score < palmMinScoreThresh) return res;
float x = classificator.at<float>(0, index, 0);
float y = classificator.at<float>(0, index, 1);
float w = classificator.at<float>(0, index, 2);
float h = classificator.at<float>(0, index, 3);
x += (column + 0.5) * stride - w / 2;
y += (row + 0.5) * stride - h / 2;
res.ymin = (y) / blazePalmSize;
res.xmin = (x) / blazePalmSize;
res.ymax = (y + h) / blazePalmSize;
res.xmax = (x + w) / blazePalmSize;
//std::cout << "score : " << score << ", coord : " << res.ymin << ", " << res.xmin << ", " << res.ymax << ", " << res.xmax << std::endl;
//if ((res.ymin < 0) || (res.xmin < 0) || (res.xmax > 1) || (res.ymax > 1)) return res;
res.score = score;
std::vector<cv::Point2d> kpts;
for (int key_id = 0; key_id < palmMinNumKeyPoints; key_id++)
{
float kpt_x = classificator.at<float>(0, index, 4 + key_id * 2);
float kpt_y = classificator.at<float>(0, index, 5 + key_id * 2);
kpt_x += (column + 0.5) * stride;
kpt_x = kpt_x / blazePalmSize;
kpt_y += (row + 0.5) * stride;
kpt_y = kpt_y / blazePalmSize;
//UE_LOG(LogTemp, Log, TEXT("kpt id(%d) : (%f, %f)"), key_id, kpt_x, kpt_y);
res.kp_arr[key_id] = cv::Point2d(kpt_x, kpt_y);
}
return res;
}
float sigmoid(float x) {
return 1 / (1 + exp(-x));
}
std::vector<PalmDetection> DenormalizePalmDetections(std::vector<PalmDetection> detections, int width, int height, cv::Scalar pad)
{
std::vector<PalmDetection> denormDets;
int scale = 0;
if (width > height)
scale = width;
else
scale = height;
for (auto& det : detections)
{
PalmDetection denormDet;
denormDet.ymin = det.ymin * scale - pad[0];
denormDet.xmin = det.xmin * scale - pad[1];
denormDet.ymax = det.ymax * scale - pad[0];
denormDet.xmax = det.xmax * scale - pad[1];
denormDet.score = det.score;
for (int i = 0; i < palmMinNumKeyPoints; i++)
{
cv::Point2d pt_new = cv::Point2d(det.kp_arr[i].x * scale - pad[1], det.kp_arr[i].y * scale - pad[0]);
//UE_LOG(LogTemp, Log, TEXT("denorm kpt id(%d) : (%f, %f)"), i, pt_new.x, pt_new.y);
denormDet.kp_arr[i] = pt_new;
}
denormDets.push_back(denormDet);
}
return denormDets;
}
void DrawPalmDetections(cv::Mat& img, std::vector<PalmDetection> denormDets)
{
for (auto& denormDet : denormDets)
{
cv::Point2d startPt = cv::Point2d(denormDet.xmin, denormDet.ymin);
cv::Point2d endPt = cv::Point2d(denormDet.xmax, denormDet.ymax);
cv::rectangle(img, cv::Rect(startPt, endPt), cv::Scalar(255, 0, 0), 1);
for (int i = 0; i < palmMinNumKeyPoints; i++)
cv::circle(img, denormDet.kp_arr[i], 5, cv::Scalar(255, 0, 0), -1);
std::string score_str = std::to_string(static_cast<int>(denormDet.score * 100)) + "%";
cv::putText(img, score_str, cv::Point(startPt.x, startPt.y - 20), cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 255), 2);
}
}
std::vector<PalmDetection> FilteringDets(std::vector<PalmDetection> detections, int width, int height)
{
std::vector<PalmDetection> filteredDets;
for (auto& denormDet : detections)
{
cv::Point2d startPt = cv::Point2d(denormDet.xmin, denormDet.ymin);
if (startPt.x < 10 || startPt.y < 10)
continue;
if (startPt.x > width || startPt.y > height)
continue;
int w = denormDet.xmax - denormDet.xmin;
int y = denormDet.ymax - denormDet.ymin;
if ((w * y < 40 * 40) || (w * y > (width * 0.7) * (height * 0.7)))
continue;
filteredDets.push_back(denormDet);
}
return filteredDets;
}
이제 인게임에서도 손 잘 찾아낸다.
현재 블라즈 코드
// Fill out your copyright notice in the Description page of Project Settings.
#include "Blaze.h"
Blaze::Blaze()
{
this->blazePalm = cv::dnn::readNet("c:/blazepalm_old.onnx");
this->blazeHand = cv::dnn::readNet("c:/blazehand.onnx");
}
Blaze::~Blaze()
{
}
void Blaze::ResizeAndPad(
cv::Mat& srcimg, cv::Mat& img256,
cv::Mat& img128, float& scale, cv::Scalar& pad
)
{
float h1, w1;
int padw, padh;
cv::Size size0 = srcimg.size();
if (size0.height >= size0.width) {
h1 = 256;
w1 = 256 * size0.width / size0.height;
padh = 0;
padw = static_cast<int>(256 - w1);
scale = size0.width / static_cast<float>(w1);
}
else {
h1 = 256 * size0.height / size0.width;
w1 = 256;
padh = static_cast<int>(256 - h1);
padw = 0;
scale = size0.height / static_cast<float>(h1);
}
//UE_LOG(LogTemp, Log, TEXT("scale value: %f, size0.height: %d, size0.width : %d, h1 : %f"), scale, size0.height, size0.width, h1);
int padh1 = static_cast<int>(padh / 2);
int padh2 = static_cast<int>(padh / 2) + static_cast<int>(padh % 2);
int padw1 = static_cast<int>(padw / 2);
int padw2 = static_cast<int>(padw / 2) + static_cast<int>(padw % 2);
pad = cv::Scalar(static_cast<float>(padh1 * scale), static_cast<float>(padw1 * scale));
cv::resize(srcimg, img256, cv::Size(w1, h1));
cv::copyMakeBorder(img256, img256, padh1, padh2, padw1, padw2, cv::BORDER_CONSTANT, cv::Scalar(0, 0, 0));
cv::resize(img256, img128, cv::Size(128, 128));
cv::cvtColor(img256, img256, cv::COLOR_BGR2RGB);
cv::cvtColor(img128, img128, cv::COLOR_BGR2RGB);
}
std::vector<Blaze::PalmDetection> Blaze::PredictPalmDetections(cv::Mat& img)
{
std::vector<Blaze::PalmDetection> beforeNMSResults;
std::vector<Blaze::PalmDetection> afterNMSResults;
std::vector<float> scores;
std::vector<int> indices;
std::vector<cv::Rect> boundingBoxes;
cv::Mat tensor;
img.convertTo(tensor, CV_32F);
tensor = tensor / 127.5 - 1;
cv::Mat blob = cv::dnn::blobFromImage(tensor, 1.0, tensor.size(), 0, false, false, CV_32F);
std::vector<cv::String> outNames(2);
outNames[0] = "regressors";
outNames[1] = "classificators";
blazePalm.setInput(blob);
std::vector<cv::Mat> outputs;
blazePalm.forward(outputs, outNames);
cv::Mat classificator = outputs[0];
cv::Mat regressor = outputs[1];
for (int y = 0; y < 16; ++y) {
for (int x = 0; x < 16; ++x) {
for (int a = 0; a < 2; ++a) {
PalmDetection res = GetPalmDetection(regressor, classificator, 8, 2, x, y, a, 0);
if (res.score != 0)
{
beforeNMSResults.push_back(res);
cv::Point2d startPt = cv::Point2d(res.xmin * blazePalmSize, res.ymin * blazePalmSize);
cv::Point2d endPt = cv::Point2d(res.xmax * blazePalmSize, res.ymax * blazePalmSize);
boundingBoxes.push_back(cv::Rect(startPt, endPt));
scores.push_back(res.score);
}
}
}
}
for (int y = 0; y < 8; ++y) {
for (int x = 0; x < 8; ++x) {
for (int a = 0; a < 6; ++a) {
PalmDetection res = GetPalmDetection(regressor, classificator, 16, 6, x, y, a, 512);
if (res.score != 0)
{
beforeNMSResults.push_back(res);
cv::Point2d startPt = cv::Point2d(res.xmin * blazePalmSize, res.ymin * blazePalmSize);
cv::Point2d endPt = cv::Point2d(res.xmax * blazePalmSize, res.ymax * blazePalmSize);
boundingBoxes.push_back(cv::Rect(startPt, endPt));
scores.push_back(res.score);
}
}
}
}
cv::dnn::NMSBoxes(boundingBoxes, scores, palmMinScoreThresh, palmMinNMSThresh, indices);
for (int i = 0; i < indices.size(); i++) {
int idx = indices[i];
afterNMSResults.push_back(beforeNMSResults[idx]);
}
return afterNMSResults;
}
Blaze::PalmDetection Blaze::GetPalmDetection(cv::Mat regressor, cv::Mat classificator,
int stride, int anchor_count, int column, int row, int anchor, int offset) {
Blaze::PalmDetection res;
int index = (int(row * 128 / stride) + column) * anchor_count + anchor + offset;
float origin_score = regressor.at<float>(0, index, 0);
float score = sigmoid(origin_score);
if (score < palmMinScoreThresh) return res;
float x = classificator.at<float>(0, index, 0);
float y = classificator.at<float>(0, index, 1);
float w = classificator.at<float>(0, index, 2);
float h = classificator.at<float>(0, index, 3);
x += (column + 0.5) * stride - w / 2;
y += (row + 0.5) * stride - h / 2;
res.ymin = (y) / blazePalmSize;
res.xmin = (x) / blazePalmSize;
res.ymax = (y + h) / blazePalmSize;
res.xmax = (x + w) / blazePalmSize;
//if ((res.ymin < 0) || (res.xmin < 0) || (res.xmax > 1) || (res.ymax > 1)) return res;
res.score = score;
std::vector<cv::Point2d> kpts;
for (int key_id = 0; key_id < palmMinNumKeyPoints; key_id++)
{
float kpt_x = classificator.at<float>(0, index, 4 + key_id * 2);
float kpt_y = classificator.at<float>(0, index, 5 + key_id * 2);
kpt_x += (column + 0.5) * stride;
kpt_x = kpt_x / blazePalmSize;
kpt_y += (row + 0.5) * stride;
kpt_y = kpt_y / blazePalmSize;
//UE_LOG(LogTemp, Log, TEXT("kpt id(%d) : (%f, %f)"), key_id, kpt_x, kpt_y);
res.kp_arr[key_id] = cv::Point2d(kpt_x, kpt_y);
}
return res;
}
float Blaze::sigmoid(float x) {
return 1 / (1 + exp(-x));
}
std::vector<Blaze::PalmDetection> Blaze::DenormalizePalmDetections(std::vector<Blaze::PalmDetection> detections, int width, int height, cv::Scalar pad)
{
std::vector<Blaze::PalmDetection> denormDets;
int scale = 0;
if (width > height)
scale = width;
else
scale = height;
for (auto& det : detections)
{
Blaze::PalmDetection denormDet;
denormDet.ymin = det.ymin * scale - pad[0];
denormDet.xmin = det.xmin * scale - pad[1];
denormDet.ymax = det.ymax * scale - pad[0];
denormDet.xmax = det.xmax * scale - pad[1];
denormDet.score = det.score;
for (int i = 0; i < palmMinNumKeyPoints; i++)
{
cv::Point2d pt_new = cv::Point2d(det.kp_arr[i].x * scale - pad[1], det.kp_arr[i].y * scale - pad[0]);
//UE_LOG(LogTemp, Log, TEXT("denorm kpt id(%d) : (%f, %f)"), i, pt_new.x, pt_new.y);
denormDet.kp_arr[i] = pt_new;
}
denormDets.push_back(denormDet);
}
return denormDets;
}
void Blaze::DrawPalmDetections(cv::Mat& img, std::vector<Blaze::PalmDetection> denormDets)
{
for (auto& denormDet : denormDets)
{
cv::Point2d startPt = cv::Point2d(denormDet.xmin, denormDet.ymin);
cv::Point2d endPt = cv::Point2d(denormDet.xmax, denormDet.ymax);
cv::rectangle(img, cv::Rect(startPt, endPt), cv::Scalar(255, 0, 0), 1);
for (int i = 0; i < palmMinNumKeyPoints; i++)
cv::circle(img, denormDet.kp_arr[i], 5, cv::Scalar(255, 0, 0), -1);
std::string score_str = std::to_string(static_cast<int>(denormDet.score * 100))+ "%";
cv::putText(img, score_str, cv::Point(startPt.x, startPt.y - 20), cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 255), 2);
}
}
std::vector<Blaze::PalmDetection> Blaze::FilteringDets(std::vector<Blaze::PalmDetection> detections, int width, int height)
{
std::vector<Blaze::PalmDetection> filteredDets;
for (auto& denormDet : detections)
{
cv::Point2d startPt = cv::Point2d(denormDet.xmin, denormDet.ymin);
if (startPt.x < 10 || startPt.y < 10)
continue;
if (startPt.x > width || startPt.y > height)
continue;
int w = denormDet.xmax - denormDet.xmin;
int y = denormDet.ymax - denormDet.ymin;
if ((w * y < 40 * 40 )|| (w * y > (width * 0.7) * (height * 0.7)))
continue;
filteredDets.push_back(denormDet);
}
return filteredDets;
}
손 검출도 잘되고 검출 스코어 임계치 올렸더니 오검출도 꽤줄음

class HANDDESKTOP_API Blaze
{
public:
Blaze();
~Blaze();
cv::dnn::Net blazePalm;
cv::dnn::Net blazeHand;
// var and funcs for blazepalm
struct PalmDetection {
float ymin;
float xmin;
float ymax;
float xmax;
cv::Point2d kp_arr[7];
float score;
};
int blazeHandSize = 256;
int blazePalmSize = 128;
float palmMinScoreThresh = 0.6;
float palmMinNMSThresh = 0.2;
int palmMinNumKeyPoints = 7;
void ResizeAndPad(
cv::Mat& srcimg, cv::Mat& img256,
cv::Mat& img128, float& scale, cv::Scalar& pad
);
std::vector<PalmDetection> PredictPalmDetections(cv::Mat& img);
PalmDetection GetPalmDetection(cv::Mat regressor, cv::Mat classificator,
int stride, int anchor_count, int column, int row, int anchor, int offset);
float sigmoid(float x);
std::vector<PalmDetection> DenormalizePalmDetections(std::vector<PalmDetection> detections, int width, int height, cv::Scalar pad);
void DrawPalmDetections(cv::Mat& img, std::vector<Blaze::PalmDetection> denormDets);
std::vector<PalmDetection> FilteringDets(std::vector<PalmDetection> detections, int width, int height);
};
'컴퓨터과학 > 언리얼' 카테고리의 다른 글
| HandDesktop11 - 손 메시 제어하기 (0) | 2024.01.31 |
|---|---|
| HandDesktop10 - blazehand c++, unreal 적용 (0) | 2024.01.29 |
| HandDesktop08 - blaze hand 사용하기 (0) | 2024.01.26 |
| HandDesktop07 - blaze hand 사용 준비하기 (0) | 2024.01.26 |
| HandDesktop06 - blaze palm 사용하기 (0) | 2024.01.25 |