책사서 pspiece 연습하려고 했지만
전기전사 회로 구현하려고 막상 책을보니 보니 너무 응용책을 골라버렸고 딴길로 가는거 같아서
결국에 이용성 교수님 강의만이라도 볼 생각으로 방향을 바꿧다.
지난 번에는 IR 센서, 모터 드라이버, Atmega128 보드 정도 밖에 못봤었는데
지금 보니 아두이노 전원 회로에 대한 강의도 올라와 있더라
나중에 직접 보드 땜질해서 만들려면
수정 진동자나 프로그래머, 다른 핀을 빼면
파워를 어떻게 해야하나 싶다가 딱 내가 필요한걸 찾았다.
강의 링크는 아래와 같다.
강의 내용은 아두이노 회로도를 가지고 설명하고계신데
다음 링크의 스케메틱에서 다운받으면 된다.
https://docs.arduino.cc/hardware/uno-rev3

아두이노 우노보드는 3가지 파트로 나눠지는데 이렇게 나누면 되나 싶긴한데
일단 아트메가 328를 다루니 MCU부터보면
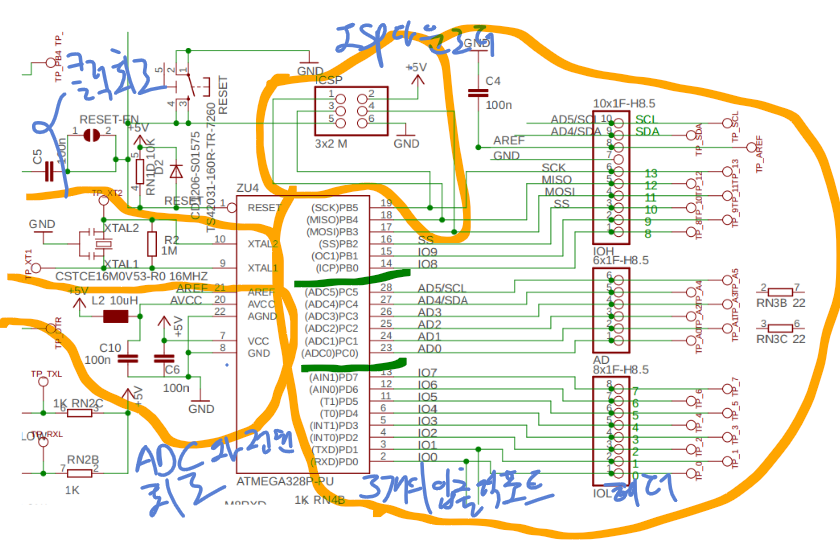
MCU 회로
- ISP 다운로더 커넥터 : 커넥터로 연결하여 플래시 메모리나 EEPROM에 직접 프로그래밍하는 단자
참조 : https://m.blog.naver.com/dododokim/221421896361
- 클럭 회로 : 수정 진동자를 이용한 클럭 발생 회로
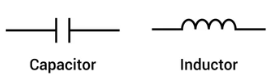
- ADC 전원, 전원 회로 : 코일과 캐패시터를 이용한 수동 필터로 노이즈 차단
- 입출력 포트 : PB, PC, PD 3개의 입출력 포트가 각각 8개의 핀과 헤더를 가짐.


아두이노 우노 전원 공급
- 방법 : DC 파워잭, VIN 핀, USB 전원
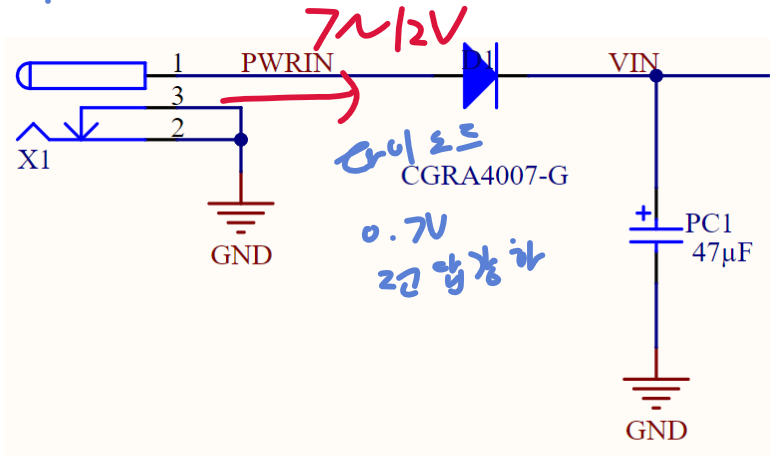
- 권장 입력 전압 : 7 ~ 12V
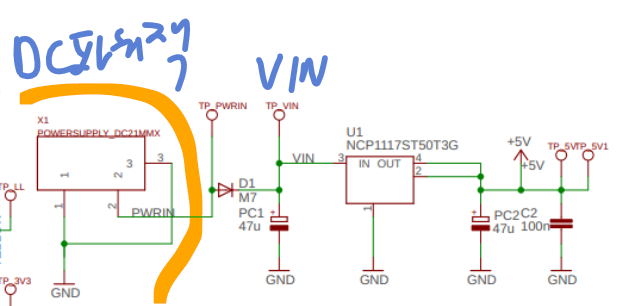
X1 DC21MM
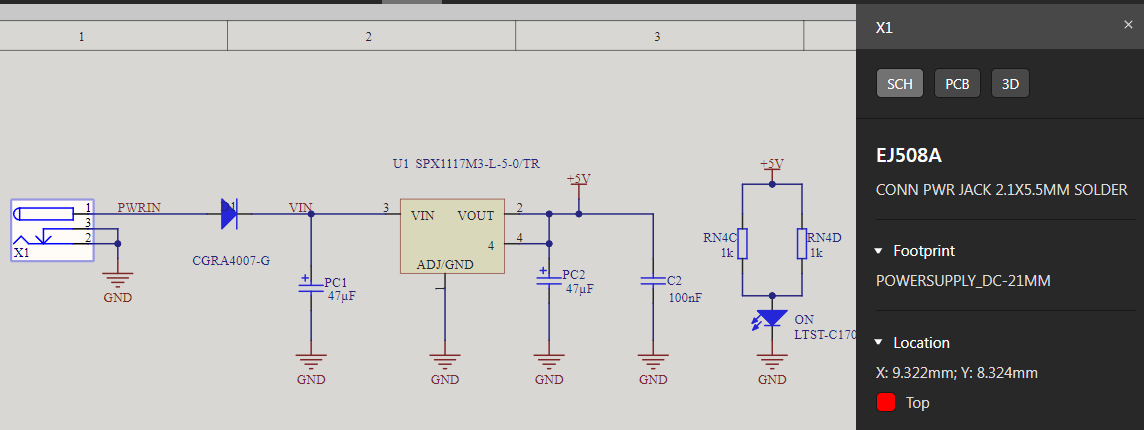
잊고 있었는데 강의 영상에 나오는 회로도는 우노 보드 설명 페이지의 인터렉티브 스케메틱으로 볼수 있다.
링크 :https://docs.arduino.cc/hardware/uno-rev3
- X1은 PWR JACK 2.1X5.5MM의 파워잭
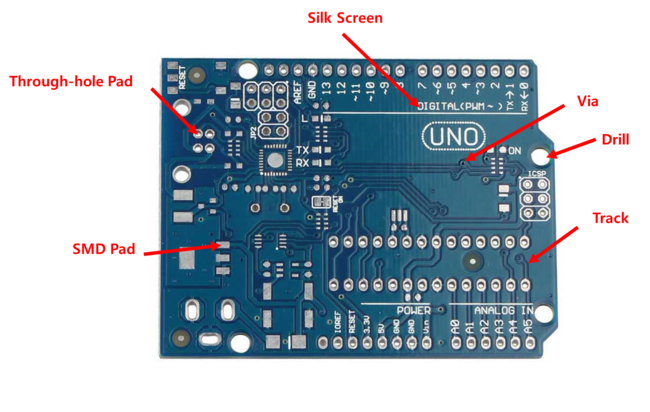
잠깐 PCB를 보기 떄문에 잠깐 관련 용어를 복습좀 해야겠다.
수업듣긴 했는데 PCB는 거의 손을 놓다보니 들어도 잘모른다.
잠깐 검색해보니 눈에 잘 들어오는게 IC뱅큐의 블로그 글이라
링크 걸어놓는다.
ref : https://m.blog.naver.com/PostView.naver?isHttpsRedirect=true&blogId=icbanq&logNo=220931164321
다시 파워잭으로 돌아와
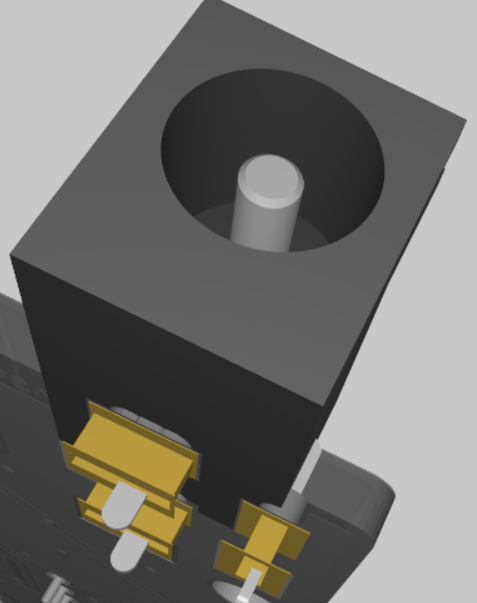
인터렉티브 뷰어로는 회로도 뿐만 아니라 PCB, 3D 형태도 같이 볼수 있다.
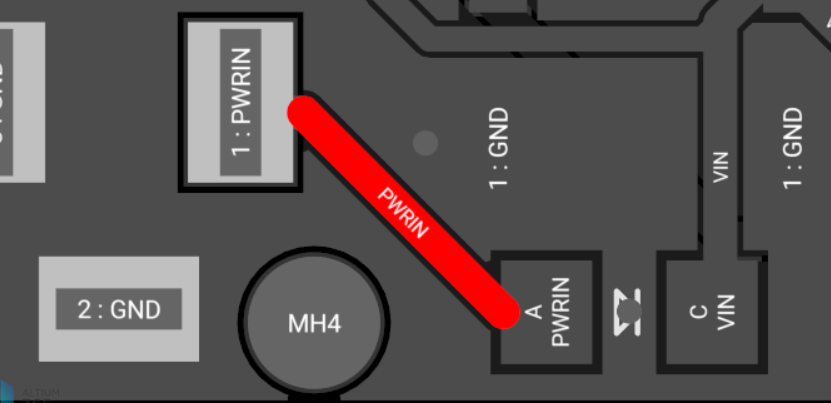
좌측 하단의 파워잭이 보이고 PCB 바닥면에 3개의 패드가 보이는데
파워잭의 1은 PWRIN으로 전원회로로 넘어가고, 2, 3은 GND로 넘어간다.
 |
 |

파워잭 다이오드
- 파워잭의 PWRIN 네트와 연결된 CGRA4007-G라는 다이오드가 있는데 1KV 1A라는 단어가 나온다.
- 허용 최대 역전압 Vpp가 1KV, 순방향 최대 전류는 1A라는 의미
 |
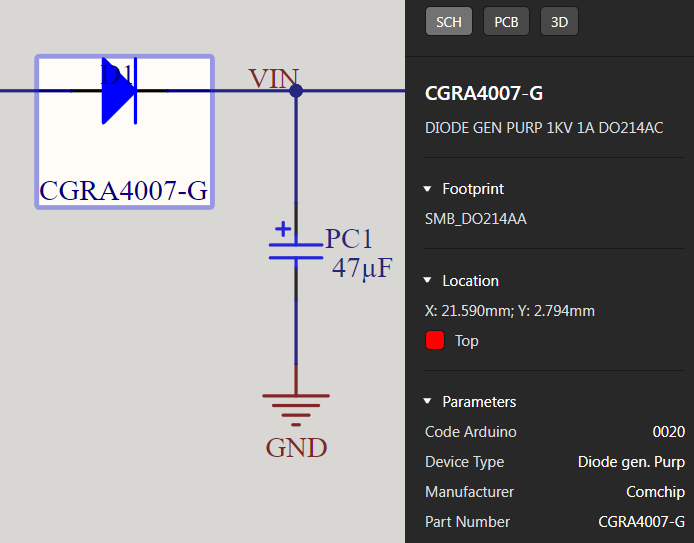 |
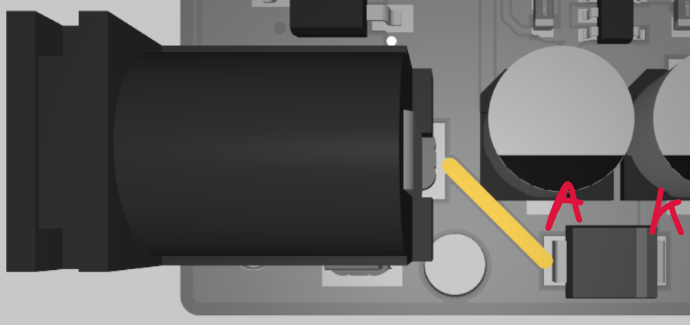
- 회로도 그대로 파워잭의 PWRIN이 다이오드의 애노드와 연결되어 있다.
 |
 |
'하드웨어' 카테고리의 다른 글
| 아두이노전원회로 - 3. 개요 마무리 (0) | 2022.06.30 |
|---|---|
| 아두이노전원회로 - 2. 레귤레이터, 전원LED (0) | 2022.06.30 |
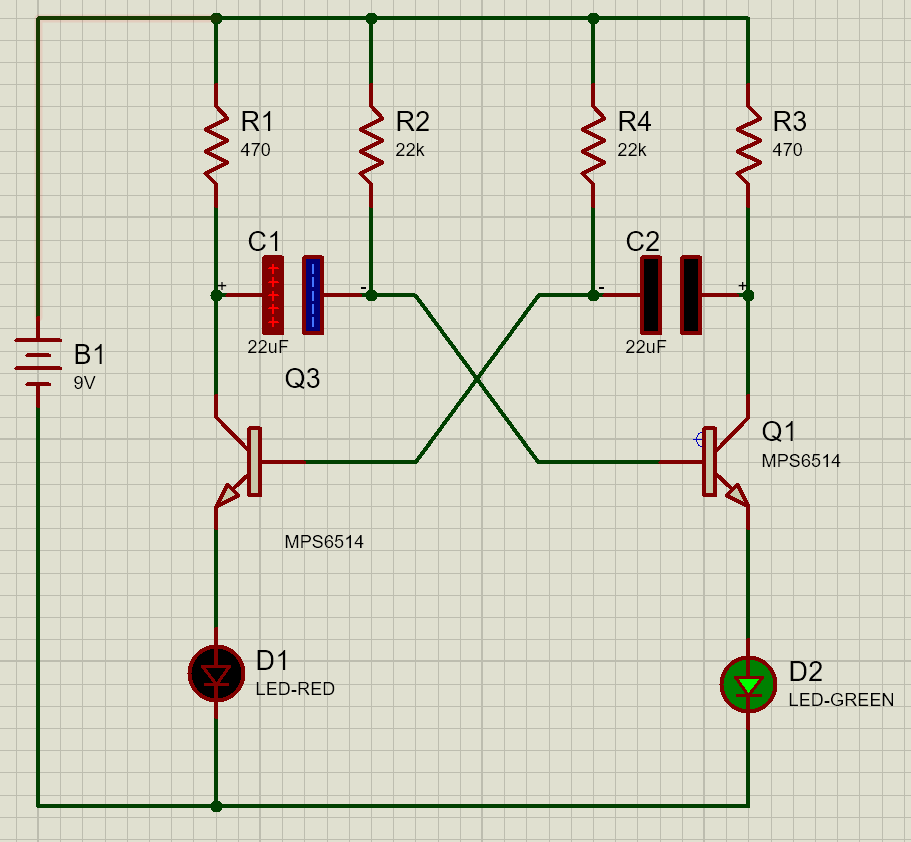
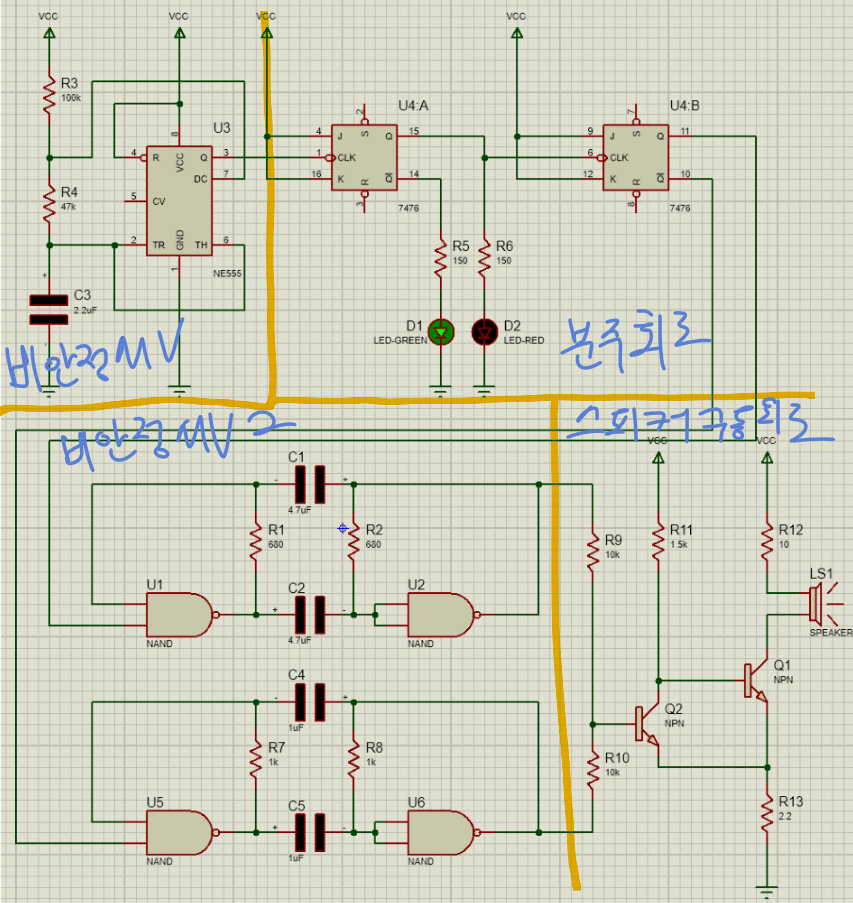
| 회로도연습 - 2. 멀티바이브레이터, 알람 회로, 박자 발생기 (0) | 2022.06.28 |
| 회로도연습 - 1. 전기전자 간단 정리 (0) | 2022.06.28 |
| 회로도연습 - 0. 개요 (0) | 2022.06.27 |