이책은 원래 이만우 님인가? 아 이만우 님의 임베디드 리눅스 os 만들기 책을 보면서 나빌로스 만들기를 진행하다가
리눅스 시스템에 대해서 좀 봐야겠다 싶어서 이것 저것 찾아보다가
가장 넓고 얕게 배우는 책인것 같아서 보게 되었다.
리눅스 구조와 제공하는 다양한 API, 프로세서, 네트워크까지
보통 다른 리눅스 책에서는 스케쥴링이나 시그널 처리 같은 것들을 깊이 다루지만
이 책에서는 일부 영역에 깊이 하기보다는 가볍게 볼수 있도록 깊지 않고 가장 넓게 볼수있는 책이었다.
대강 당장 궁금했던 리눅스 구조나 개념들에 대해서 거의 다 살펴봤고
네트워크 파트나 make에 대한 내용도 더 진도나가고는 싶었지만
몇일간(길지도 않았지만) 잠깐 하면서 당장 리눅스에 대해서 궁금했던 부분도 어느정도 해소됬고,
계속 이걸 하기에는 동기부여가 잘안되서
이제 다음으로 곧 3d 프린터 운용기능사 실기 시험이있어서 실기시험을 준비하면서
지난번에 하다만 나빌로스를 진행해볼까 싶다.
그래도 이 책을 보고 공부하면서 간단한 디버깅 방식이나 시스템 콜, 가상 메모리가 뭔지, 디렉터리 구조 등
이전보다는 약간이나마 더 정리하면서 도움됬던거 같다.
나빌로스 만들기를 진행할수도 있고, 결국에는 이런걸 공부해서 간단한 프로토 타이핑을 해보는게 목표라
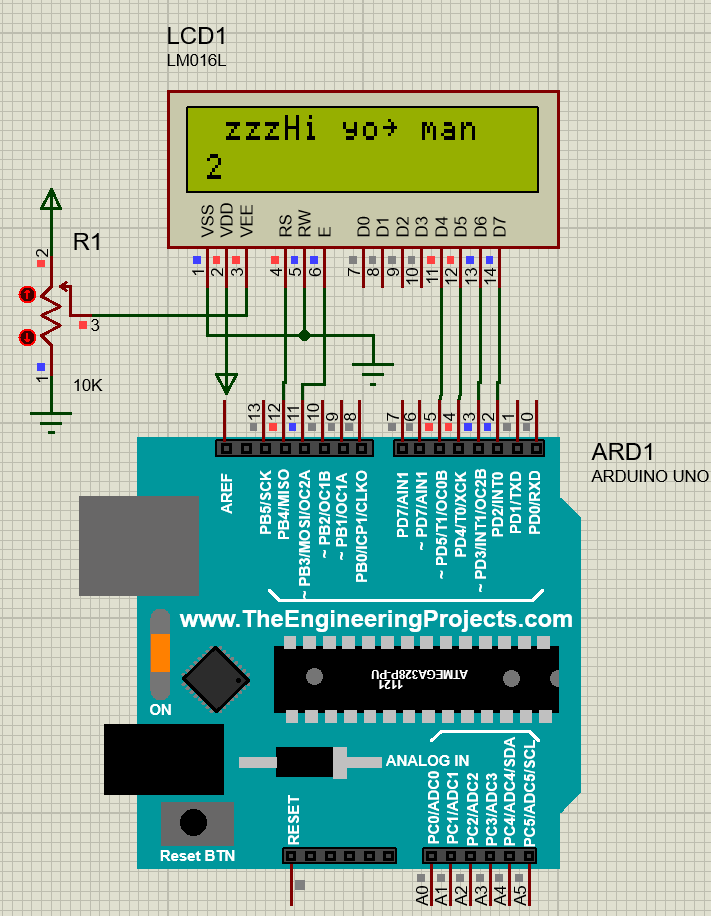
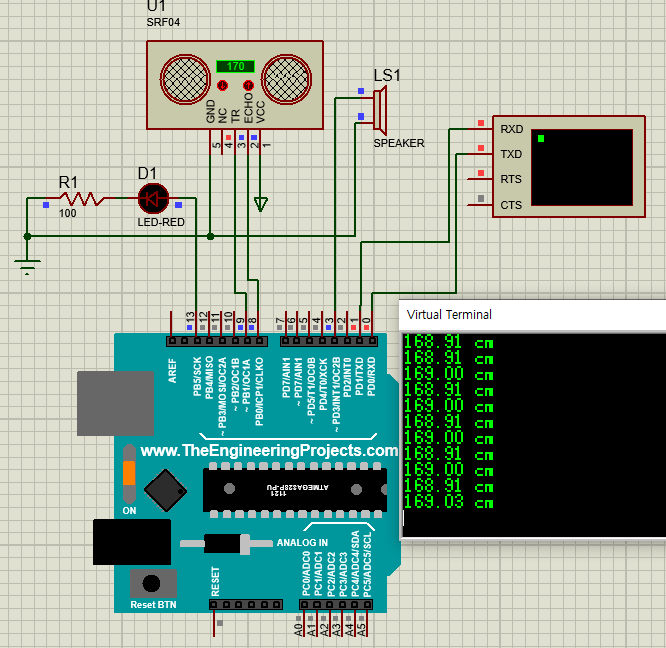
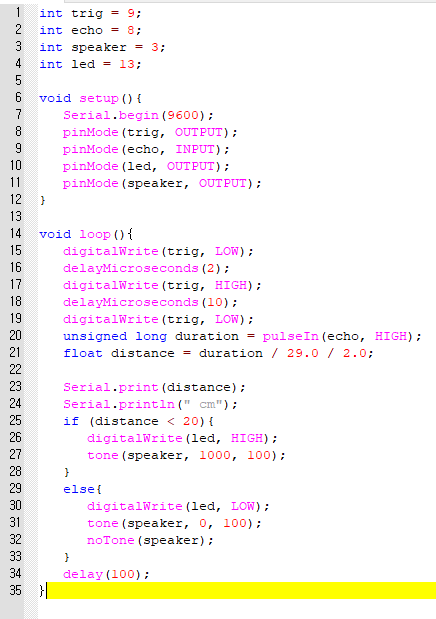
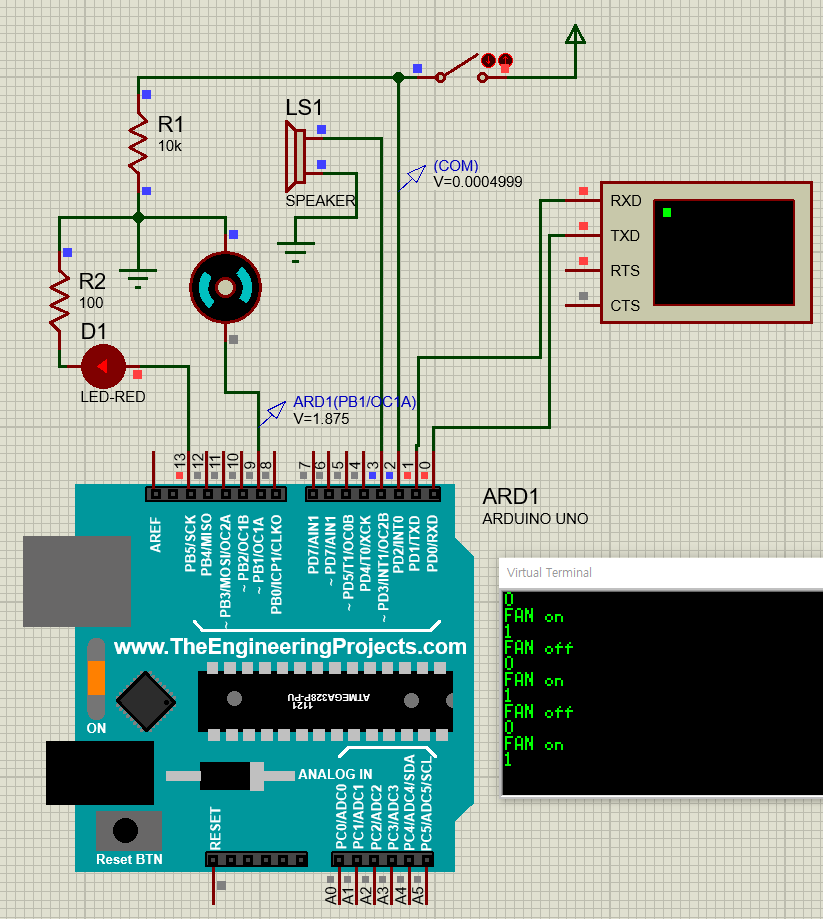
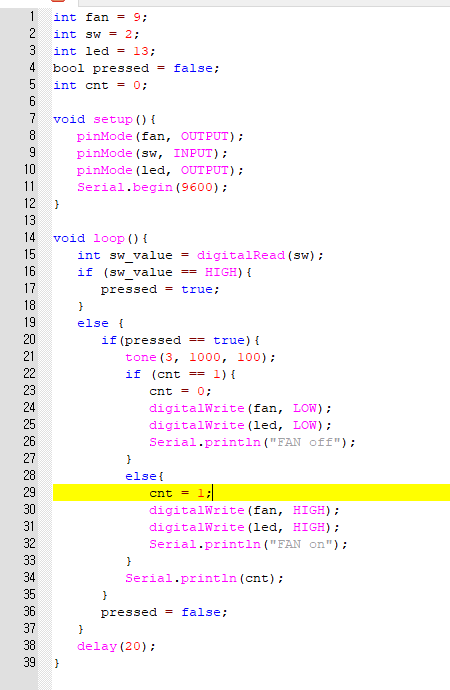
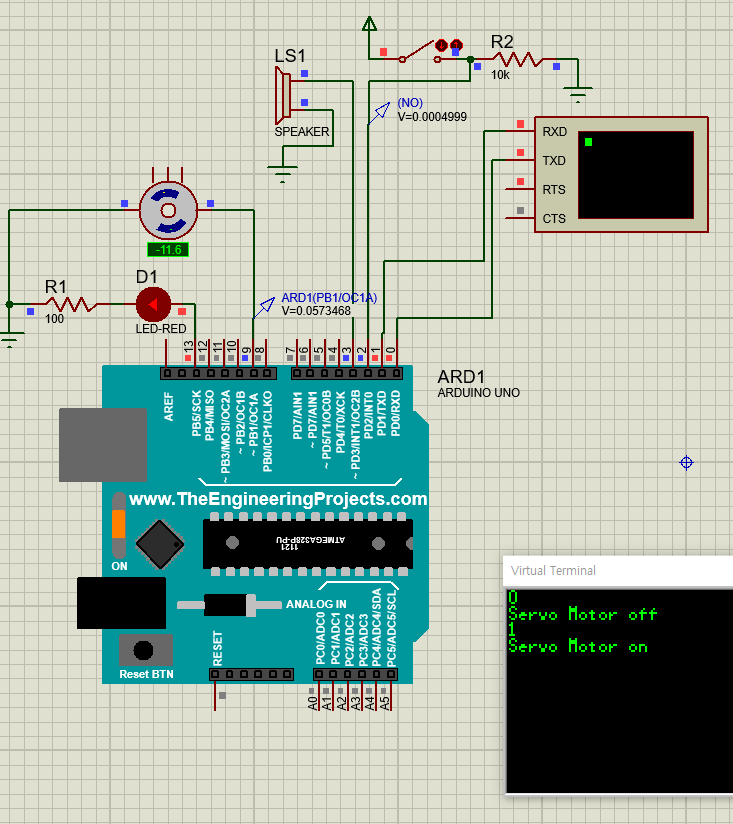
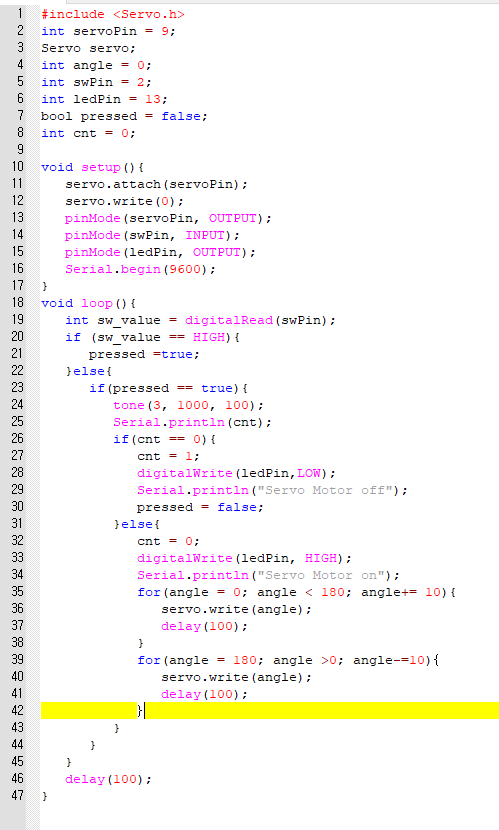
이용성 교수님이 유튜브에 올리신 프로테우스로 센서를 만들고 시뮬레이션을 돌려보거나,
'실습과 그림으로 배우는 리눅스 구조' 혹은 '디버깅을 통해 배우는 리눅스 커널의 구조와 원리' 이런 책을 볼까 싶다.
최근에서야 책을 많이 읽으면서 알게 된게, 이런 책들이 다 리눅스를 다루고있기는 하지만 각 책마다의 컨셉이 있다는 점과
바로 내용이 많은 책을 보기 보다는 당장 나한태 너무 어렵지도 않고, 잘 전달하는지 그러니까 나한태 가장 잘 맞아보이는 책을 골라서 보는게 중요한걸 느꼈다.
당장 아무생각없이 산 책이 나한태 너무 어렵거나 쉬워서 안 맞는데 돈아깝다고 보다가 재미없어서 포기했던 적이 여러번 있었는데 그럴때 능동적으로 나한태 조금 쉬운 책을 보고나서 준비 되었을때 조금 어려운 다음 단계 책을 봤었더라면 그렇게 쉽게 흥미를 읽지 않았을까 싶은 생각이 든다. 공부 순서가 중요한 만큼 책 보는 순서도 중요한거같다.
내가 이번에 본 '모두를 위한 리눅스 프로그래밍'이라면 리눅스 초심자(명령어 같은건 조금은 아는) 리눅스 프로그래밍 전반을 넓고 얕게 배운다면,
'실습과 그림으로 배우는 리눅스 구조'는 다른 책들보다 추상적인 리눅스 내부 구조를 이해하기 좋게 꽤 많은 그림과 예제코드를 제공하고 있었다.
'디버깅을 통해 배우는 리눅스 커절 구조와 원리'이 책은 아직 구입하지 않아서 미리보기만 봤지만, 보통 임베디드시스템 교재하면 비싸고 구하기 힘든 atmega나 stm 교육용 보드 구입을 전제로 하고 있는것에 비해 여기서는 가장 쉽게 구할수 있는 교육용 플랫폼인 라즈베리 파이를 사용한다는 점이 좋아보이고, 나한태 필요한 디버깅 연습을 하면서 '모두를 위한 리눅스'보다는 조금 더 깊이 보는데 도움될거같다.
그리고 요즘 책보는데 아낌없이 투자하면서 보고있는데, 진작에 이랬어야 했다는 생각이 든다. 그 동안 돈이 아깝다는 이유로 원서 pdf를 보거나 무료 강의 같은걸로 공부해 왔었는데, 돈이 아깝다고 국내 서적을 보지 않고 부족한 영어 실력으로 원서를 보려고 하다 금방 흥미를 읽었던 적이 정말 많았다.
가뜩이나 영어를 그렇게 잘하는것도 아니면서 모르는 내용을 원서로 공부하려하다가 포기하기를 반복해놓고, 국내에는 어떤 책들이 있는지 찾아보지도 않아놓고 윤성우의 c, 소켓 예전에 한두번 본거가지고 우리나라에는 코딩 문법만 가리키는 기본서밖에 없어서 우리나라에는 볼만한 책이 없다느니 하는 생각을 가지고 있었다.
내가 나한태 필요한게 무엇인지 당장에 힘들어서 고민하지도 필요한걸 자세히 찾지 않다보니까, 대충 보이는 대부분의 IT 서적들이 국비학원생처럼 양산된 코딩 문법 강사들이 쓴 기초책 밖에 없어보였고, 해외에서 번역해온 전문 서적도 엉터리로 번역된게 많았었다.
하기사 내가 책을 좀 찾아보려 했던게 3 ~ 4년 전인데 그 땐 지금처럼 프로그래밍 관련 수학이나 인공지능, ROS, 컴퓨터 비전책이 그렇게 많지 않아서 좋아보이는 책이 표윤석 박사님의 거북이 책, 오일석 교수님의 머신비전/컴퓨터비전 등 10개도 넘지 않을 정도로 그렇게 없었던거같다.
수학 책은 컴퓨터 과학 영역을 고려해서 나온 책도 별로 없었고, 인공지능 책도 3분 딥러닝 텐서플로맛인가? 지금처럼 얼마 없긴했고, 그나마 전문적인 제목으로 무슨 무슨 프로젝트니 하는 packt 책들은 하나같이 번역기 돌린것같은 내용 뿐이었으니 우리나라에는 엉터리 책뿐이야!라고 생각해놓고 제대로 공부하는거 없이 시간이 지금까지 와버리고 말았다. 적어도 리눅스 시스템 프로그래밍 분야는 꽤 괜찬은 책이 많았는데 이쪽을 볼 생각을 못하고, 여유있지도 못했고
아무튼 요즘은 정말 친절하게 쓴 책들이 많아져서 도움받을데 없이 혼자 삽질하고 있는 나한태는 이전보다는 공부하기 좋아진거같다.
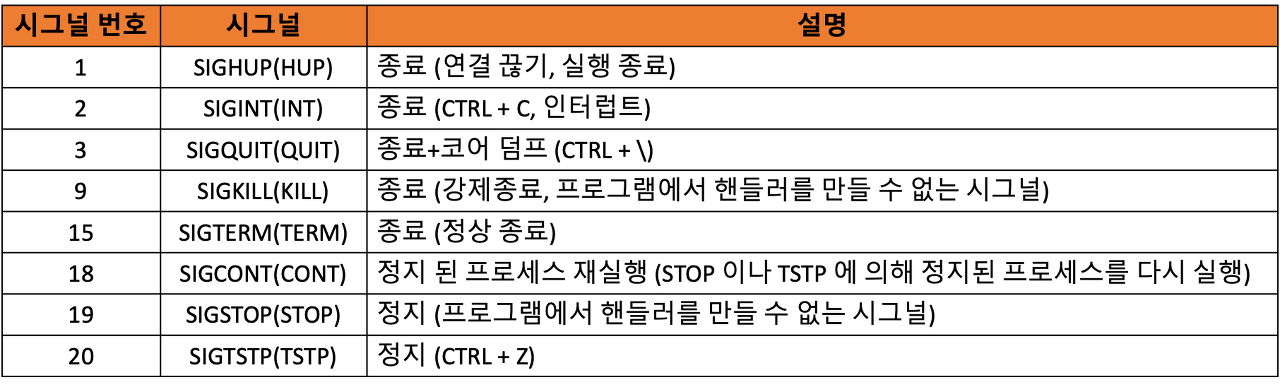
struct sigaction{
/* sa_handler 혹은 sa_sigaction 둘중 하나만 씀*/
void (*sa_handler)(int);
void (*sa_sigaction)(int, siginfo_t*, void*);
sigset_t sa_mask;
int sa_flags;
}
- act에 아래의 구조체 사용 해서 시그널 액션 등록. 한번 설정한 시그너 핸들러는 계속 유지, sa_flags에 SA_RESTART 추가시 시스템 콜 재시작(보통 사용), sa_mask로 차단할(블록할) 시그널 지정가능-핸들러 처리중엔 타 sig방지sigemptyset()
#include <unistd.h>
int main(int argc, char *argv[])
{
int opt;
while ((opt = getopt(argc, argv, "af:tx")) != -1)
{
switch (opt)
{
case 'a':
//a일떄 코드
break;
case 'f':
//f일떄 코드
break;
.....
case '?':
//잘못된 옵션이 전달될 때 코드
break;
}
}
// 프로그램 본체
}
옵션 파싱 2 : 긴 옵션 getopt_long
#define _GNU_SOURCE
#icnlude <getopt.h>
int get_long(int argc, char * const argv[], const char *optdecl, const struct option *longoptdecl, int *longindex);
struct option{
const char *name;
int has_arg;
int *flags;
int val;
};
extern char *optarg;
extern int optind, opterr, optopt;
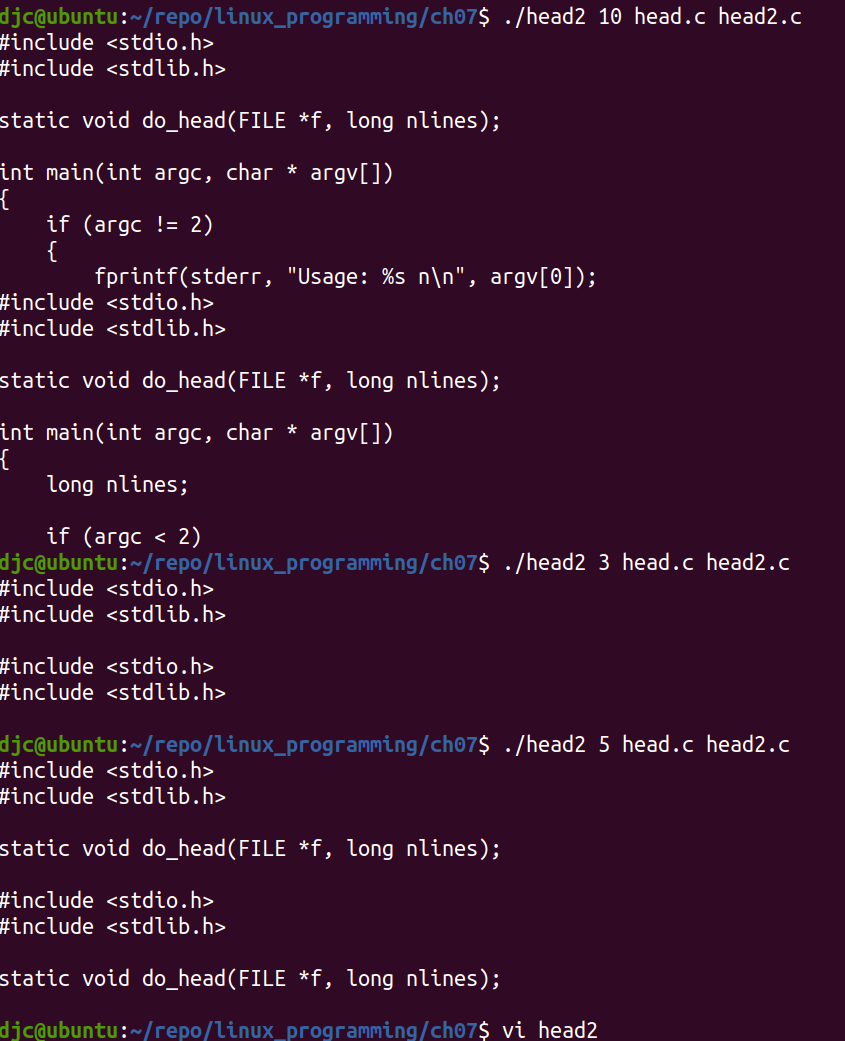
옵션 처리가 가능한 head
#include <stdio.h>
#include <stdlib.h>
#define _GNU_SOURCE
#include <getopt.h>
static void do_head(FILE *f, long nlines);
#define DEFUALT_N_LINES 10
static struct option longopts[] = {
{"lines", required_argument, NULL, 'n'},
{"help", no_argument, NULL, 'n'},
{0, 0, 0, 0}
};
int main(int argc, char * argv[])
{
int opt;
long nlines = DEFUALT_N_LINES;
while ((opt = getopt_long(argc, argv, "n:", longopts, NULL)) != -1){
switch (opt){
case 'n': // -n == --lines
nlines = atol(optarg);
break;
case 'h':
fprintf(stdout, "Usage: %s [-n LINES] [FILE ...]\n", argv[0]);
exit(0);
case '?':
fprintf(stdout, "Usage: %s [-n LINES] [FILE ...]\n", argv[0]);
exit(0);
}
}
if (optind == argc){
do_head(stdin, nlines);
}
else {
int i;
for (i = optind; i < argc; i++){
FILE *f;
f = fopen(argv[i], "r");
if (!f){
perror(argv[i]);
exit(1);
}
do_head(f, nlines);
fclose(f);
}
}
}
static void do_head(FILE *f, long nlines)
{
int c;
if (nlines <= 0) return;
while ((c = getc(f)) != EOF) {
if (putchar(c) <0 ) exit(1);
if (c == '\n'){
nlines--;
if (nlines == 0) return;
}
}
}
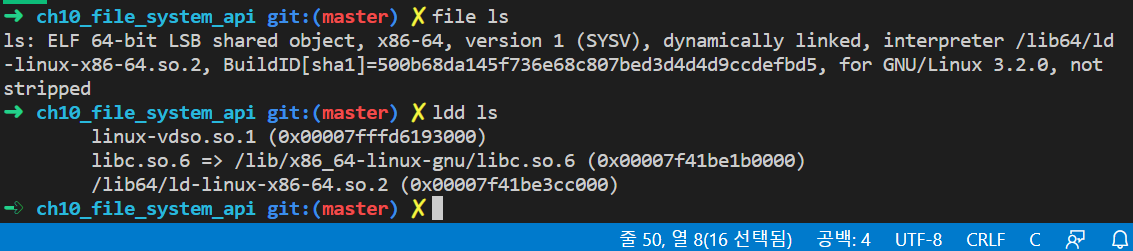
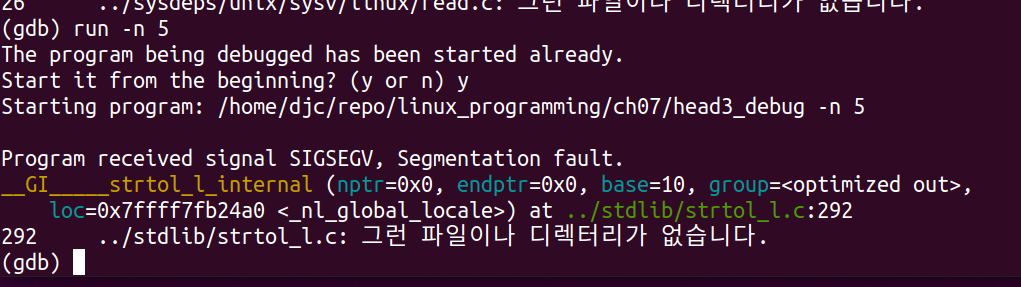
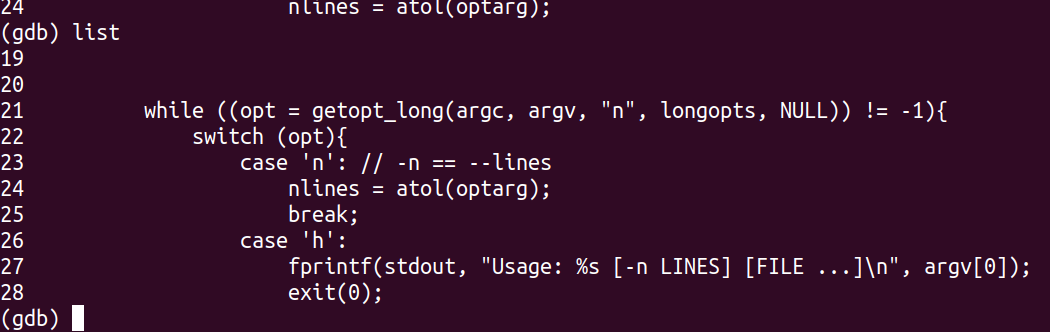
gdb로 디버깅하기
- 위 코드의 while ((opt = getopt_long(argc, argv, "n:", longopts, NULL)) != -1){ 를