이 글을 쓰려고 몇 일을 허비했는지 모르겠다.
아무튼 이전에는 아두이노 쓸땐 USB전원으로 넣는것 말고는 잘 몰랐지만
아두이노 드론 같은데서 리튬 이온 베터리를 쓰고 충전하는걸 보면서 어떻게 하면 저렇게 할수 있을지 궁금해하곤 했었다.
그러다가 방학 전에 아두이노 전원회로에 대해서 쭉 훑어보면서 대략적인 전원회로 동작에 대해 좀 배운덕에
이제 베터리를 어떻게 하면 달아서 쓸수있을지 볼 준비가 된것 같았다.
지금 이 글을 쓴건 7월 19일이고
베터리 정리해서 주문한게 방학 이전이라 1-2주전쯤이라 가물가물한데
구글에 조금만 검색해보면 바로나온다
https://www.google.com/search?q=18650+%EB%B0%B0%ED%84%B0%EB%A6%AC+%EB%B3%B4%ED%98%B8%EB%AA%A8%EB%93%88+%EC%82%AC%EC%9A%A9%EB%B2%95&oq=18650+%EB%B0%B0%ED%84%B0%EB%A6%AC+%EB%B3%B4%ED%98%B8%EB%AA%A8%EB%93%88+%EC%82%AC%EC%9A%A9%EB%B2%95&aqs=chrome..69i57.5008j0j4&sourceid=chrome&ie=UTF-8
18650 배터리 보호모듈 사용법 - Google 검색
상세보기18650 배터리 2CELL(2S) 보호회로 과충전, 과방전, 쇼트보호, 과전류 방지 ... 상세보기백업 배터리 스위칭 모듈 (유선전원 차단시 배터리로 전환시켜주는 ...
www.google.com
오래 쓸수 있게 용량 큰 베터리를 원했고 조금 찾아보니
보통 18650? 베터리를 많이 쓰나보더라
거기다가 베터리 충전 모듈로 TP4056이 있길래
많은 사람들이 이조합으로 쓰길래 이 두개와 배터리 홀더 정도를 구입했다.
ref : https://rasino.tistory.com/284
【 배터리와 충전모듈#24】 18650 리튬배터리 + TP4056 충전모듈
※ 주의! : 18650과 같은 리튭배터리는 직접적인 합선(쇼트)이나 회로내에서의 합선 등에 의해 불꽃과 소폭발의 가능성이 있는 제품이므로 다루실 때 충분한 주의와 사전지식이 필요하니 주의하
rasino.tistory.com
이 링크에서 베터리와 충전 전원 그리고 출력을 어떻게 연결하면 좋은지 보기 쉬운 그림이 있으니
처음 쓰면 한번 봐도 좋을거같다.
ref : https://fishpoint.tistory.com/4566
리튬 배터리 충전 모듈 TP4056 사용법
리튬 배터리 충전 모듈 사용법 아두이노 나노의 새로운 제품군이 최근 추가 되었습니다. 먼저, 나노보드와 동일한 외형으로 성능을 높인 Nano Every 와, IoT 기능을 추가한 NANO 33 IoT 버전, 그리고 NANO
fishpoint.tistory.com
위 두 링크에서 충분히 TP4056 모듈에 대해서 설명하다보니 굳이 안봐도 되지만
여기서는 TP4056의 여러 단자버전들을 소개한다.
ref :https://makernambo.com/140
TP4056 배터리충전모듈 사양과 사용방법
1. TP4056 모듈 TP4056 모듈은 5V USB 전압을 입력받아 3.7V 리튬이온 배터리를 충전시켜 주는 모듈로서 저렴한 가격에 쓰임새가 많아 자주 사용하는 모듈이다. 즉 18650 등 리튬이온배터리로 회로를 구
makernambo.com
여러개 구입하긴 했지만 중요한 몇가지를 집자면
1. 18650베터리
2. TP4056
3. 점퍼핀타입 18650 베터리홀더 1구
4. PL2303TA USB-TTL
베터리는 엠씨유보드 닷컴의 과방전 보호회로 내장된 18650 베터리
https://smartstore.naver.com/mcuboard/products/5977292175?NaPm=ct%3Dl5rtg8bi%7Cci%3Dcheckout%7Ctr%3Dppc%7Ctrx%3D%7Chk%3De6ceecaa5acc4d7643b537b62528315d480db967
KC인증 18650 리튬배터리 과방전 보호회로내장 2200mAh : 엠씨유보드닷컴
[엠씨유보드닷컴] 코딩, 전자부품은 엠씨유보드닷컴
smartstore.naver.com
TP4056
https://smartstore.naver.com/openidea/products/4833009692?NaPm=ct%3Dl5rth4mb%7Cci%3Dcheckout%7Ctr%3Dppc%7Ctrx%3D%7Chk%3D6bee1cc37dbf4a8b14caae245e288a8bb849d39f
TP4056 리튬배터리 1A 충전모듈 (C TYPE USB) [OPEN-TA02-003] : 오픈아이디어
[오픈아이디어] 당신의 IDEA를 OPEN하세요. 아두이노 전자부품 쇼핑몰 OPENIDEA
smartstore.naver.com
베터리 홀더
https://smartstore.naver.com/openidea/products/5770253193?NaPm=ct%3Dl5rtha2x%7Cci%3Dcheckout%7Ctr%3Dppc%7Ctrx%3D%7Chk%3D5e645be86bd9eb4109126fb88ec1d3030274b60a
18650 1구 배터리 홀더 점퍼핀타입 [OPEN-AA02-001] : 오픈아이디어
[오픈아이디어] 당신의 IDEA를 OPEN하세요. 아두이노 전자부품 쇼핑몰 OPENIDEA
smartstore.naver.com
프로그램 업로드에 쓸 USB-TTL 케이블
https://smartstore.naver.com/openidea/products/4833188705?NaPm=ct%3Dl5rtgyqt%7Cci%3Dcheckout%7Ctr%3Dppc%7Ctrx%3D%7Chk%3D16c218827704b1264e594a06f5dc74c5408bcbc1
PL2303TA USB to TTL SERIAL CABLE [OPEN-TB05-002] : 오픈아이디어
[오픈아이디어] 당신의 IDEA를 OPEN하세요. 아두이노 전자부품 쇼핑몰 OPENIDEA
smartstore.naver.com
이전에 아두이노 전원회로를 공부할때 역전압 방지를 위해 다이오드를 쓰긴 했는데
내가 쓰는 베터리가 3.7 ~ 4.2V 왔다 갔다 하는 베터리다 보니 그냥 쓰질 않았다.
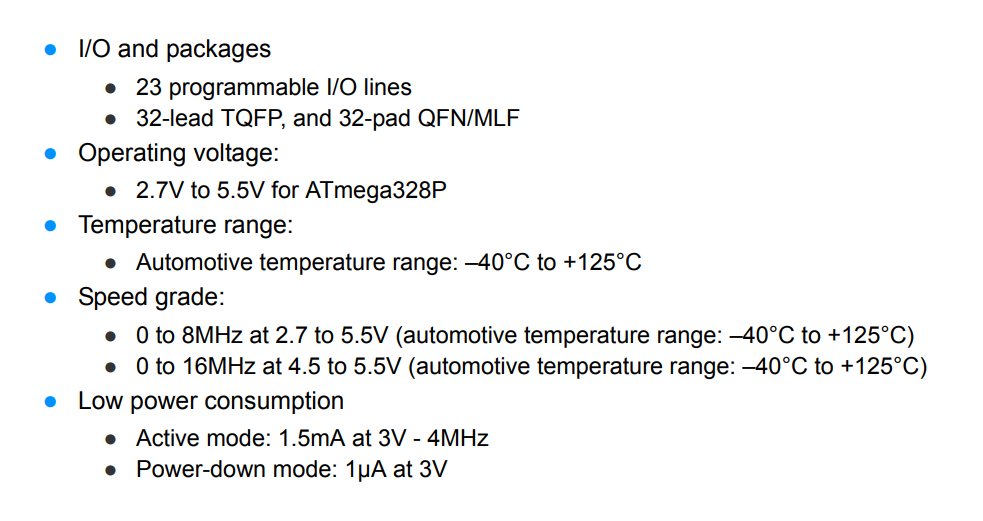
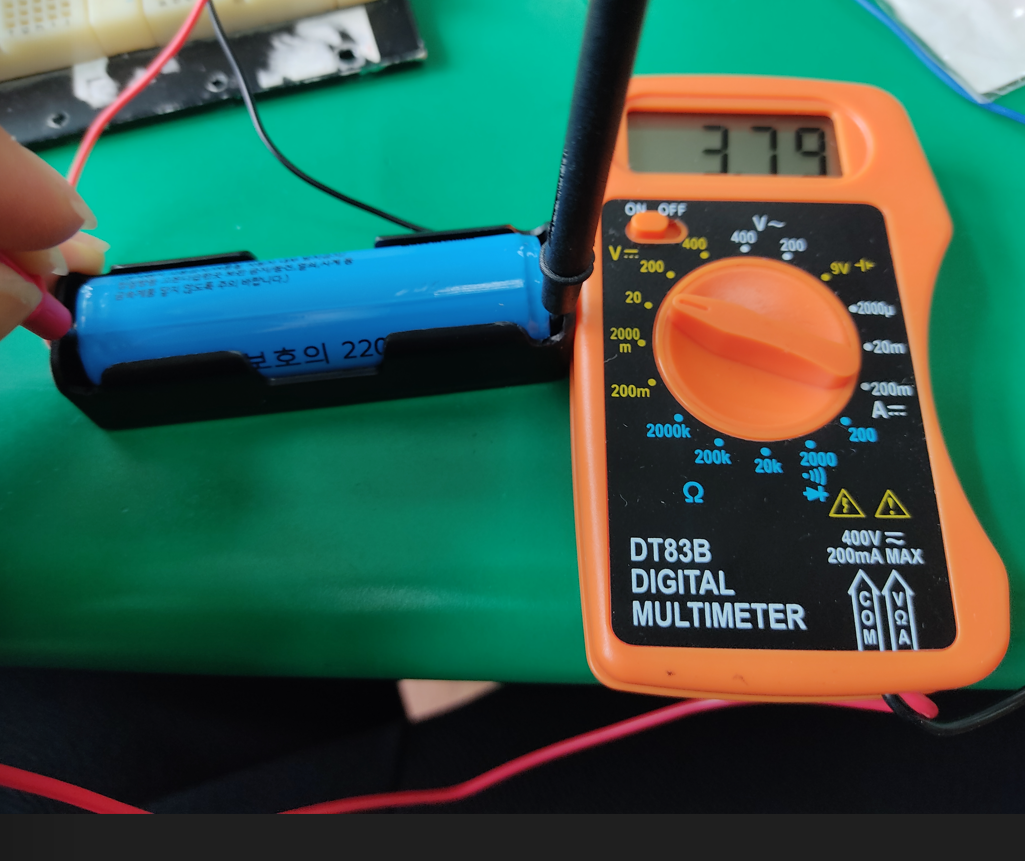
어짜피 8Mhz 내부 클락 사용때는 최저 2.7V면 괜찬다고 해서 써도 되는데
그냥 설마 역전압 때문에 뭔일 나겠나 싶어서 그냥 말았다.
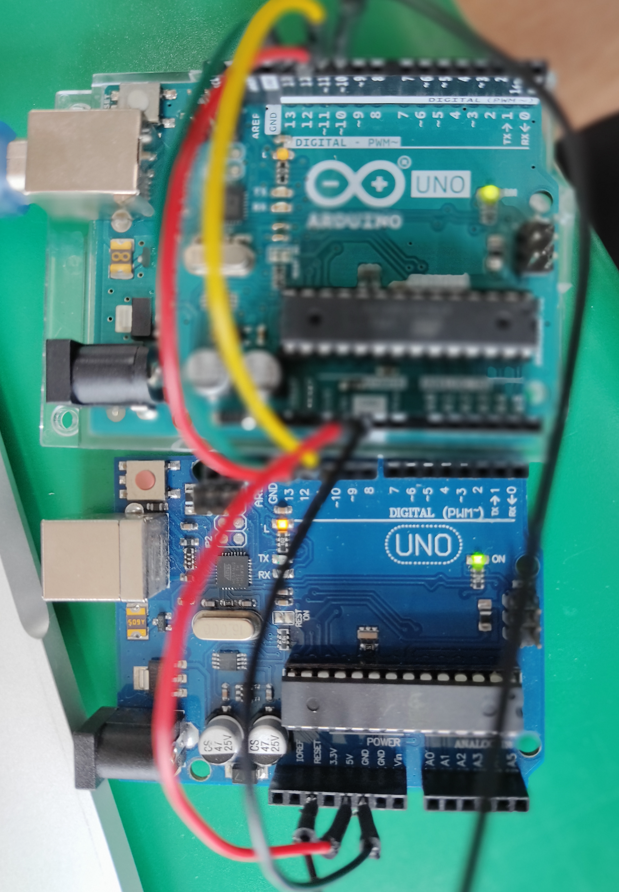
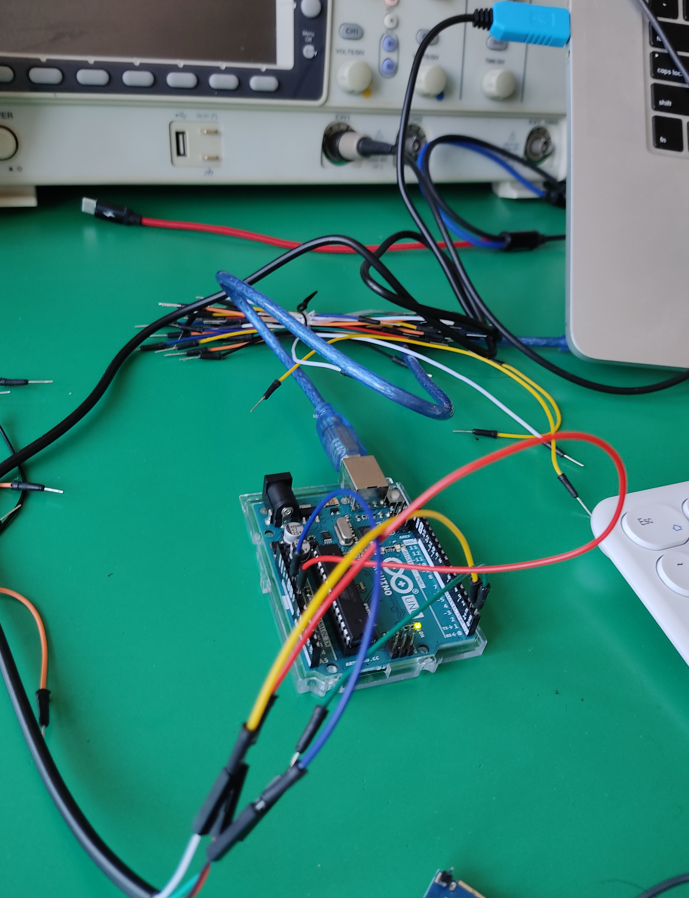
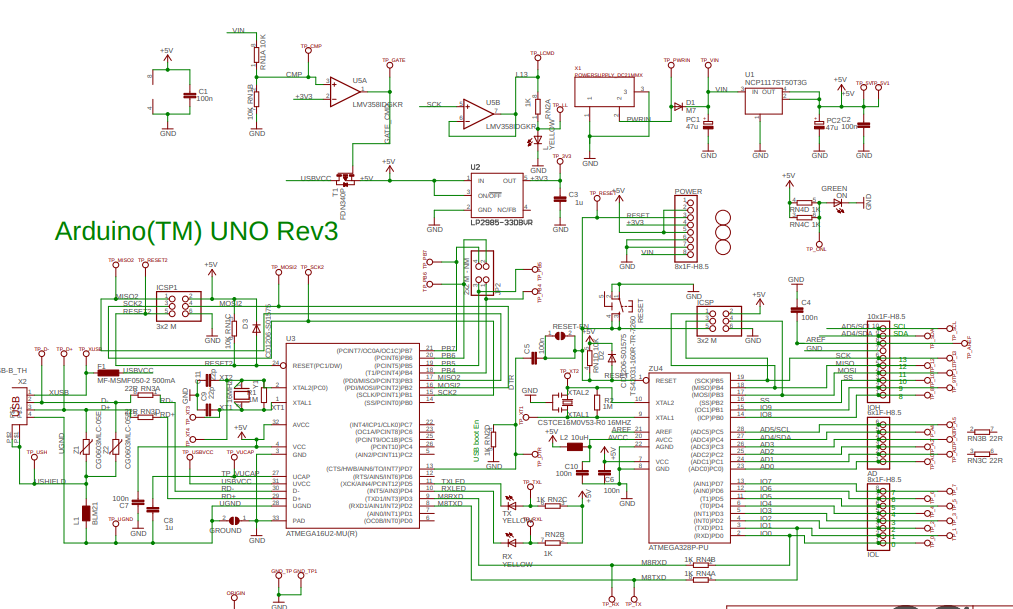
이런 식으로 쓸거고
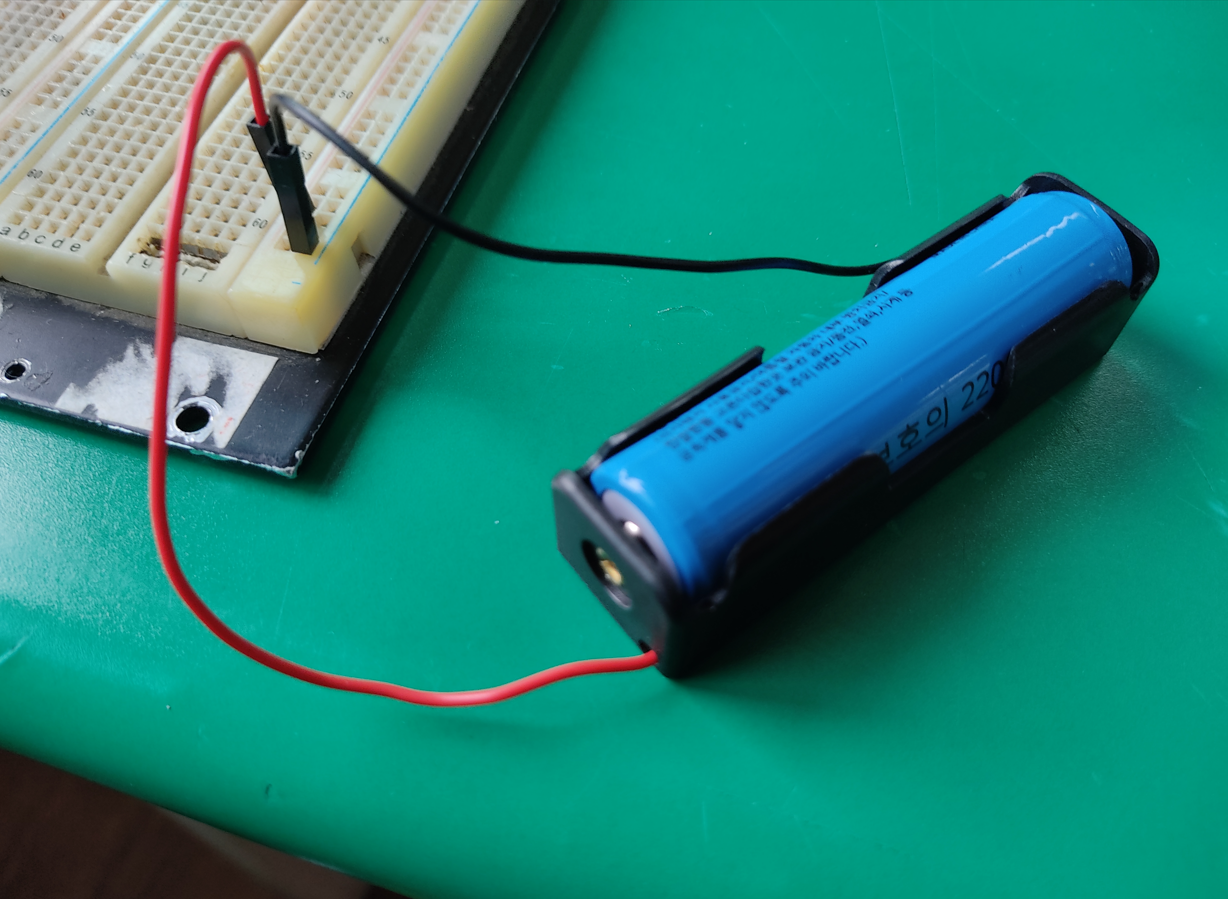
파워 서플라이와 TP4056으로 충전중인 모습
TP4056은 떔질안되있으니 핀헤더도 필요
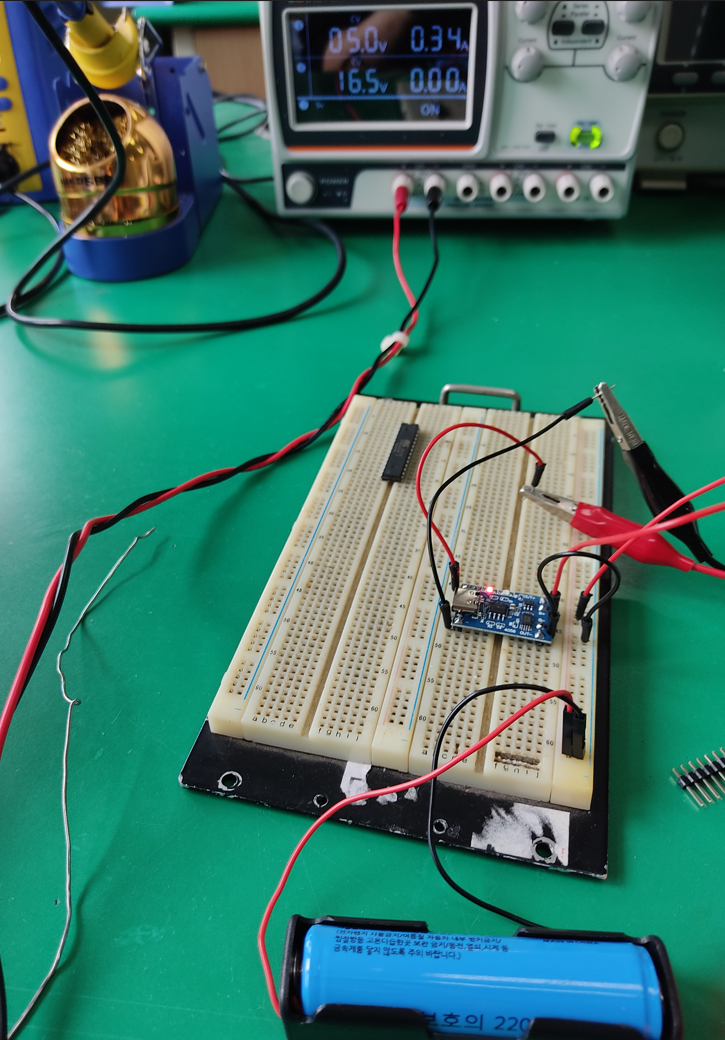
중간에 전압 찍어보니 조금씩 오르길래
충전하는 동안 다음으로 넘어가면
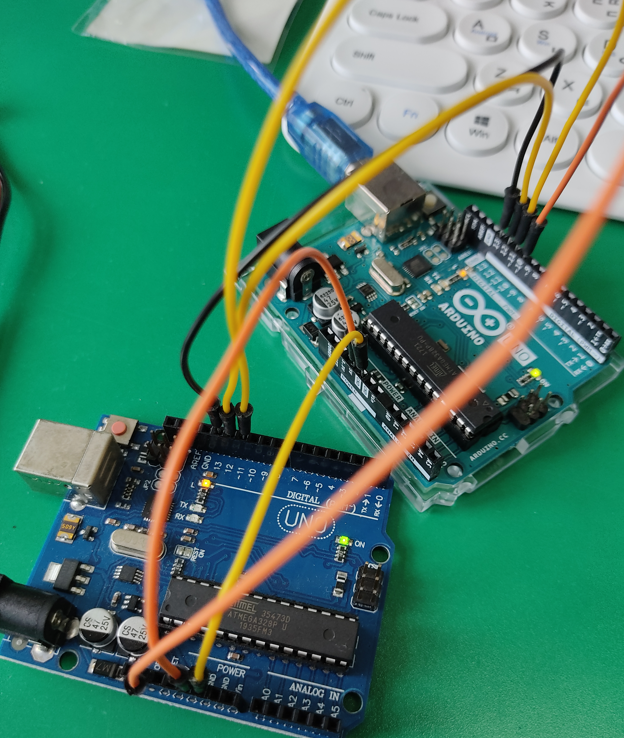
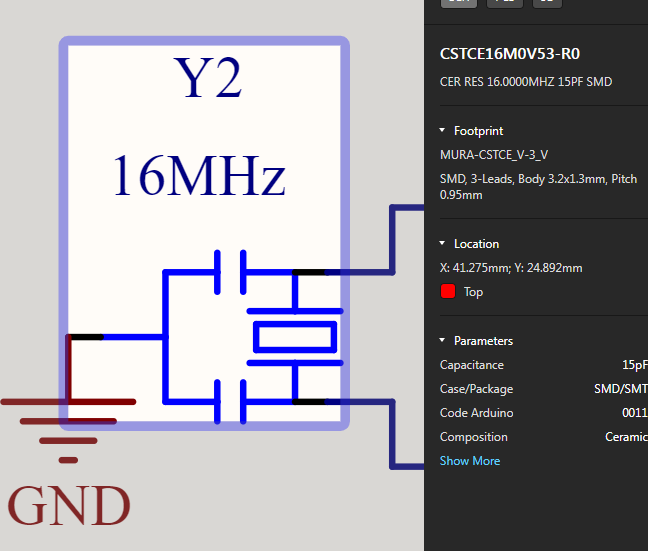
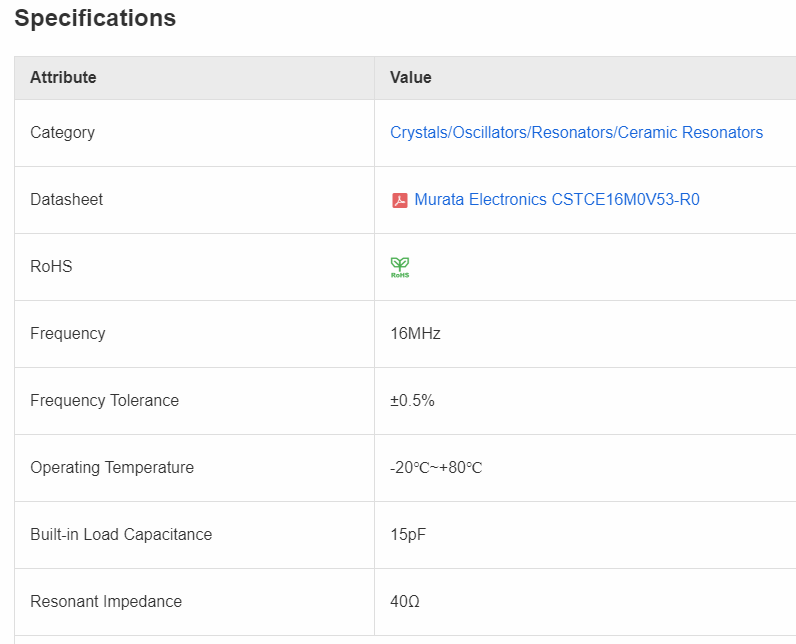
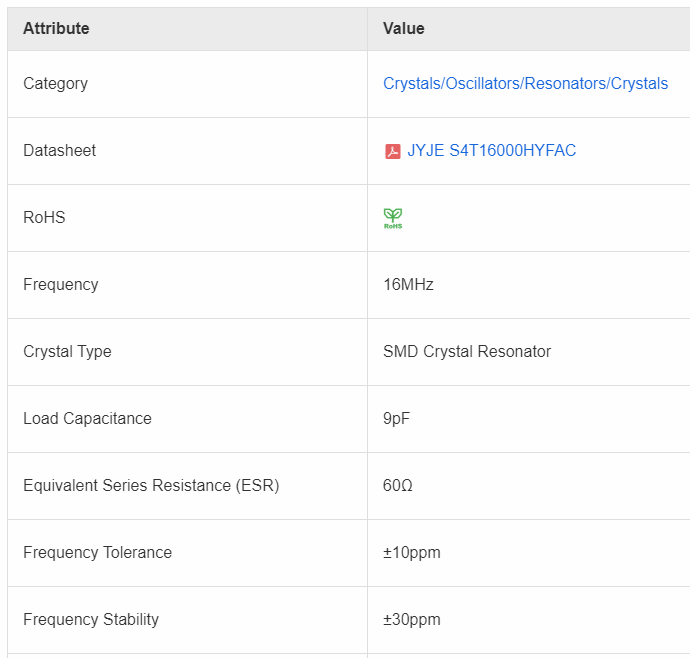
원래 우노보드의 ATmega328을 쓰려면
보통 외부 크리스탈을 달아서 클럭을 주는데,
예전에 얼핏 내부 클럭이 있다고 들었습니다.
데이터 시트에도 3.3V 정도의 저전압에서는 8MHz 저속으로 동작한다고하니
내부 클럭을 쓸순없나 찾아봤어요
가장 먼저 찾은 자료가 도두가이님이 만드신 자료인데
보통 아두이노를 쓸땐 usb랑 우노보드랑 연결해서 업로드 버튼만 누르면 됬지만
여기서는 부트로더를 굽니, 우노보드 두개가지고 어째저째 한다고 설명합니다.
부트로더가 뭔가 부팅 할때 가장 처음시작할때 동작하는건 알지만 이게 뭐가 중요한가? 에대해선 설명이 조금 부족합니다.
나중에 찾아보긴 했는데 일단 이 글대로 진행해보면
ref: https://m.blog.naver.com/PostView.naver?isHttpsRedirect=true&blogId=mapes_khkim&logNo=221890832646
ATMEGA328P-PU만으로 작동하는 내부클럭 아두이노 만들기(초간단 아두이노)
ATMEGA328P-PU만으로 작동하는 내부클럭 아두이노 만들기(초간단 아두이노) ATMEGA328P-P...
blog.naver.com
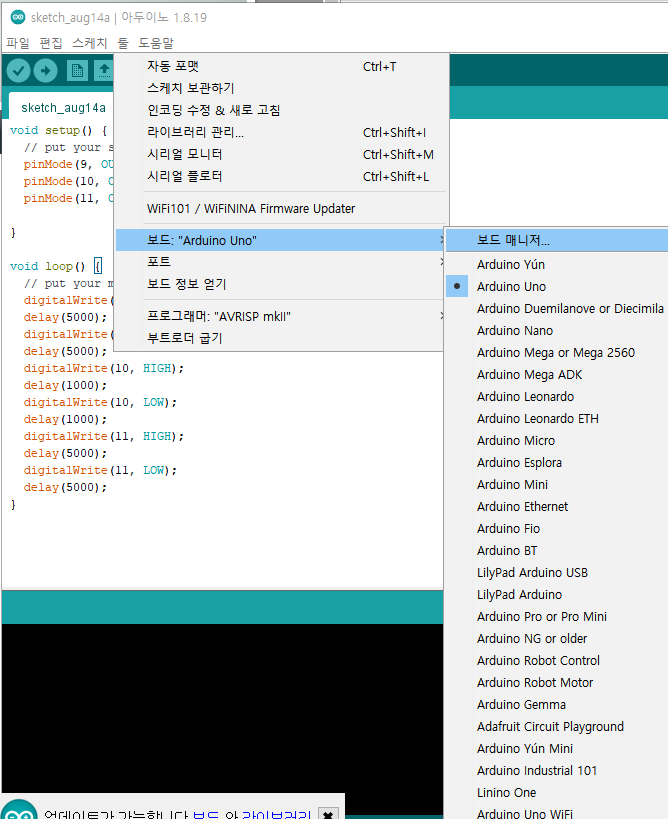
가장 먼저 boards.txt에다가 8MHz 내부 클럭 사용에 대한 내용을 추가하라고하는데
이분이 말한데로 해당 파일에다가 설정 내용을 추가하고 스캐치를 다시 열어도 반영되지가 않았습니다..
분명 arduino의 파일 위치열기를 하면 program files/아두이노 폴더 쯤으로 가니
여기 있는 boards.txt 수정이 맞지 않나 싶지만 저의 경우에는 그렇진 않더라구요.
내부 클럭 쓰도록 부트로더좀 굽고싶은데 설정 파일부터가 안먹히니 한참 해맸습니다.
찾아보니 아래의 링크에서 프로그램 파일즈가 아니라
사용자폴더/앱데이터/로컬/아두이노15/패키지/아두이노/하드웨어/avr 안에 있는 boards.txt였네요.
이 파일을 수정 후에는 정상적으로 추가되었습니다.
https://www.instructables.com/Arduino-IDE-Creating-Custom-Boards/
Arduino IDE: Creating Custom Boards
Arduino IDE: Creating Custom Boards: Over the past six months I have spent a lot of time porting different libraries to the Robo HAT MM1 board developed by Robotics Masters. This has lead to discovering a lot about these libraries, how they work behind the
www.instructables.com
우리나라에서 쓴 글중에 이게 가장 대략적으로 잘 쓴거같긴한데
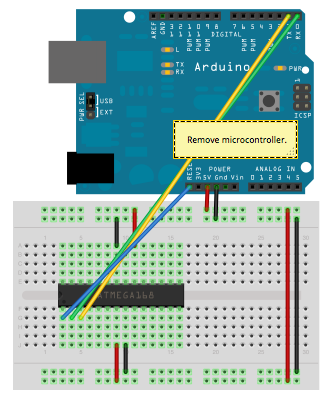
여기서 소개하는데로 왜 이러는지 당시에는 몰랐지만 프로그래밍 보드와 타겟 보드를 연결해서
부트로더 굽기를 하면 잘 구워집니다.
잠깐 딴길로 새면
마이크로 컨트롤러의 프로그래밍 업로드 방식을 다시봤습니다.
부트로더를 구울때 프로그래머 보드에다가 Arduino ISP를 올리고 타겟보드와 연결해서 하는데
이 ISP가 뭔가 싶었습니다.
블루베리 파이님의 블로그에서는
ISP가 PCB에 연결해서 프로그램 메모리 EEPROM을 지우거나 쓰는 방식이라고 설명을하고
https://m.blog.naver.com/dododokim/221421896361
부트로더와 ISP 다운로더
부트로더 일반적으로 시스템(운영체제)을 정상적으로 작동시키기 위한 프로그램이 부트로더다. AVR에서...
blog.naver.com
이 글을 보고나서야 프로그래밍 방식이 JTAG도 있는게 생각났는데
ISP랑 다른건 디버깅이 가능한 점이고
https://dailylifetip.tistory.com/entry/JTAG-ISP-SPI-I2C
JTAG, ISP, SPI, I2C ?????????
ISP ( In-System Programing ) or SOP (System-on Programing) : 비휘발성 메모리(rom, flash memory 등)를 보드나 시 스템에 장착한 이후에 그 내용물을 프로그래밍 하는 것으로 이 기능이 없을 경우 프로그래밍..
dailylifetip.tistory.com
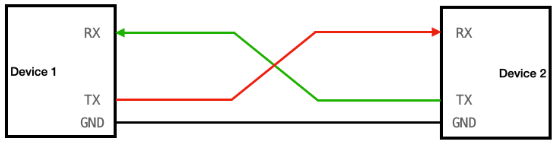
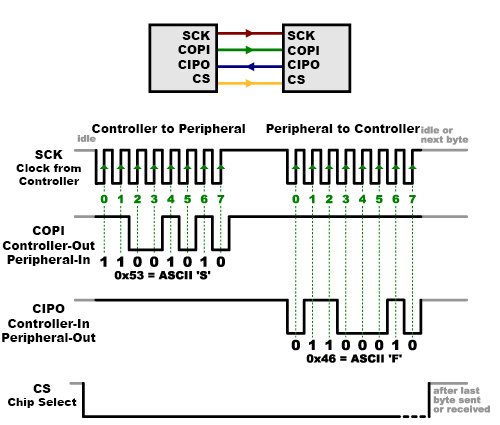
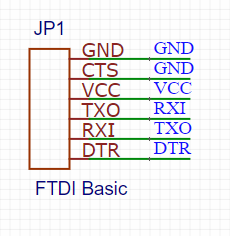
그러면 USB-TTL 케이블을 쓰는데 TTL이란 뭔가
이전에 본적 있는 나무길 블로그에서 잘 설명해줍니다.
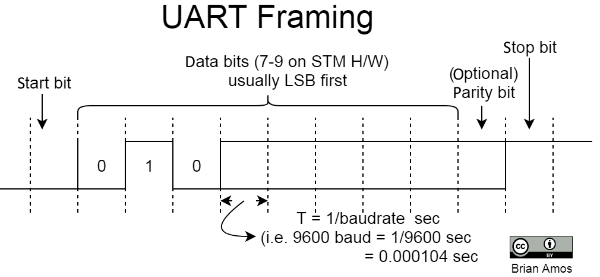
RS-232라는 직렬통신이 있는데 이게 +-12V(232C는 +-5V) 양전압을 써서 간격이 더 크니
0~ 5V로 구분하는 TTL보다는 노이즈의 영향을 덜 받는다는 내용인데
아무튼 TTL은 노이즈의 영향을 받긴 더 쉽지만 전압 레벨이 간편해서 직렬 통신때 많이 쓴다는 소린가봅니다.
https://treeroad.tistory.com/entry/%EC%99%9C-TTL-%ED%86%B5%EC%8B%A0%EC%9D%B8%EA%B0%80
왜 TTL 통신인가
TTL 레벨과 RS-232C 레벨 통신의 차이는 아래와 같은 파형으로 구분될 수 있다. TTL 레벨은 0 V 와 5 V 를 왔다갔다 하면서 0과 1을 표현하지만 RS_232C 레벨은 +, -5V 양 전압 사이를 왔다갔다 해서 노이즈
treeroad.tistory.com
그러면 ISP, JTAG로 프로그래밍이 가능한데
USB-TTL 케이블, FTDI 케이블로도 되는데 뭐가 차이일까요?
찾은 글중에는 제타지니님의 블로그 글에서 이 내용이 확 와닿았습니다.
아직 잘은 모르지만 아래의 그림대로 USB TTL로 아직 왜쓰는지 모를 부트로더를 못 넣으니
부트로더 구울때는 직렬 변환기 대신 다른 우노보드를 ISP로 만들어서 써야 했던거 같습니다.
https://bnme.tistory.com/9
DIY Arduino-(3)이론조립...i.USB 연결, 외부 클럭
안녕하세요 제타지니입니다. 본 포스트는 많은 서적을 참고하였으나, 중심적으로 <아두이노 상상을 스케치하다.> 허경용 저. 의 DEUino를 중심으로 수학하였습니다. 조립에 대한 포스트를 쓰는
bnme.tistory.com
그리고 계속 MCU를 만지면서 메모리맵, Flash memory와 eeprom을 마주치는데 막연하게 알고있어서
나무길님의 글에서 다시 봤습니다.
대강 정리하면
eeprom은 바이트 단위로 읽고 쓰기 가능한 불휘발성 메모리
flash memory는 블록 단위로 읽고쓰기 가능한 eeprom이란 점인데, eeprom보다 구조가 간단해서 대용량이 가능한정도?로 이해하고 넘어가고
https://treeroad.tistory.com/entry/Flash-Memory%EC%99%80-EEPROM-%EC%B0%A8%EC%9D%B4%EC%A0%90
Flash Memory와 EEPROM 차이점
EEPROM과 Flash Memory 비교 EEPROM EEPROM(Electrically Erasable PROM)은 On-Board 상태에서 사용자가 내용을 Byte 단위로 Read하거나 Write 할 수 있으므로 사실상 SRAM처럼 사용 할 수 있는 불휘발성 메모리이..
treeroad.tistory.com
atmega328 데이터시트나
boards.txt 건드릴때 fuse 란 용어가 자꾸 쓰이는데
이걸 어떻게 해석해야 하나 싶었다.
이건 boards.txt 에 추가한 8MHz 내부 클럭 설정부분
##############################################################
atmega328bb.name=ATmega328 on a breadboard 8 MHz internal clock
atmega328bb.upload.tool=avrdude
atmega328bb.upload.protocol=arduino
atmega328bb.upload.maximum_size=30720
atmega328bb.upload.maximum_data_size=2048
atmega328bb.upload.speed=57600
atmega328bb.bootloader.tool=avrdude
atmega328bb.bootloader.low_fuses=0xE2
atmega328bb.bootloader.high_fuses=0xDA
atmega328bb.bootloader.extended_fuses=0x05
atmega328bb.bootloader.unlock_bits=0x3F
atmega328bb.bootloader.lock_bits=0x0F
atmega328bb.bootloader.file=atmega/ATmegaBOOT_168_atmega328_pro_8MHz.hex
atmega328bb.build.mcu=atmega328p
atmega328bb.build.f_cpu=8000000L
atmega328bb.build.board=AVR_UNO_INTERNAL
atmega328bb.build.core=arduino
atmega328bb.build.variant=standard
사전에 나오는 도화선? 결합시키다 같은 용어 그대로 해석하자니 말이 잘 읽혀지지 않았는데
순딩님이 이거랑 관련해서 퓨즈 비트 글을 정리해놓은걸 찾았다.
결론적으로는 제어 레지스터의 값을 설정했던 것 처럼 부트로더 설정을 해주는게 퓨즈 비트였다.
어떻게 퓨즈 비트를 설정할지는 이분 블로그나 데이터 시트 보고 잘 정리해야할거같다.
https://m.blog.naver.com/PostView.naver?isHttpsRedirect=true&blogId=nkkh159&logNo=220801733605
[AVR/ATmega] 퓨즈 비트(Fuse bits), 클럭 설정
이전 포스팅에선 락 비트(Lock bits)를 설명드렸으니, 이번 글에선 퓨즈 비트(Fuse bits)를 설명드리겠습...
blog.naver.com
부트로더를 구운 이후 부터는 도두가이님의 글 내용이 잘 이해되지는 않았습니다.
부트로더를 올리고 나서 USB-TTL 케이블을 블로그 글에 나온 대로 연결해서 업로드를 해도 계속 안되서
리셋 누르는 타이밍이 안맞아서 업로드가 안되나 싶었지만 우노 보드에 이 케이블을 연결해서 업로드해보니 또 잘됬구요.
ref: https://m.blog.naver.com/PostView.naver?isHttpsRedirect=true&blogId=mapes_khkim&logNo=221890832646
ATMEGA328P-PU만으로 작동하는 내부클럭 아두이노 만들기(초간단 아두이노)
ATMEGA328P-PU만으로 작동하는 내부클럭 아두이노 만들기(초간단 아두이노) ATMEGA328P-P...
blog.naver.com
왜 USB TTL로 빵판의 atmega에 직접 업로드가 안되는지는 아직도 찾지 못했지만
그래도 업로드는 해야하니 좀더 찾아봤는데
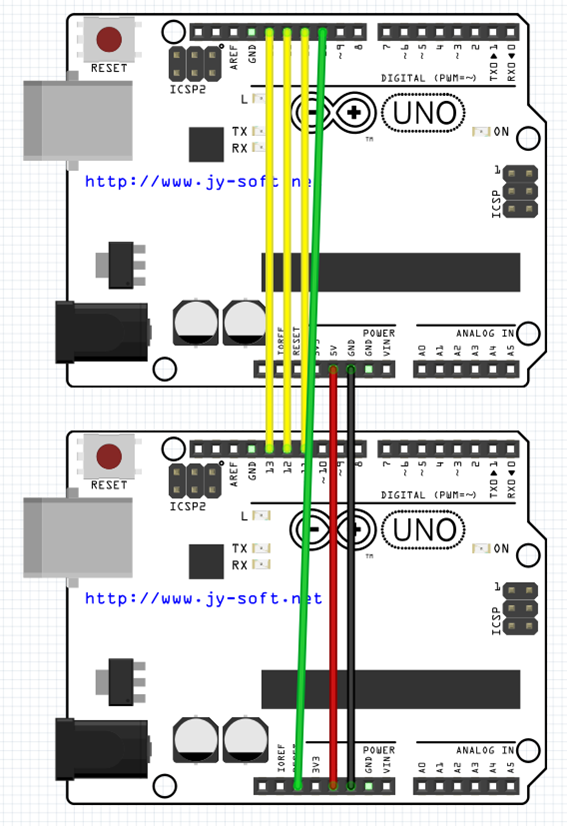
이 글의 업로딩 방법을 참고했습니다.
USB-TTL은 가지고 있지만, FTDI는 없고 거기다가 업로딩할떄마다 RESET을 눌러줘야히니
타이밍 맞추기가 번거로웠는데 이렇게 구성하면 여기선 프로그래머 보드의 RESET 핀을
타겟 보드의 RESET 핀과 연결하니 눌러줄 필요가 없습니다
https://create.arduino.cc/projecthub/techmirtz/arduino-without-external-clock-crystal-on-atmega328-d4fcc4
Arduino Without External Clock Crystal on ATmega328
Everyone uses a 16MHz oscillator for a homemade Arduino, but did you know that ATmega328 can run without it? By Techmirtz.
create.arduino.cc
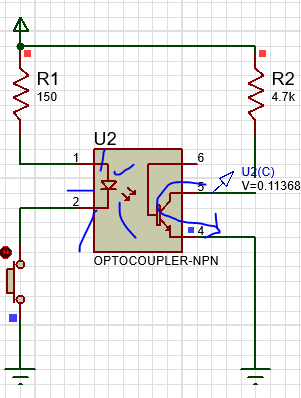
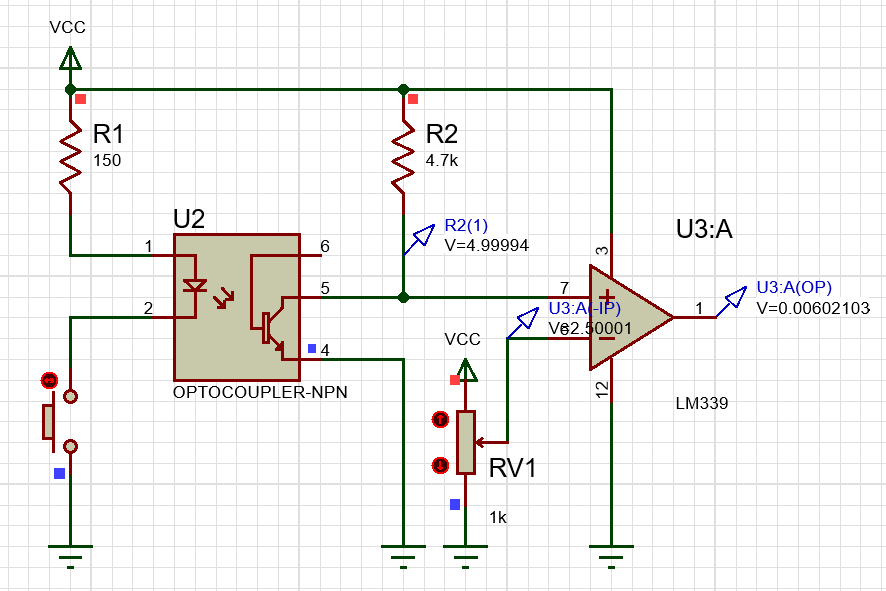
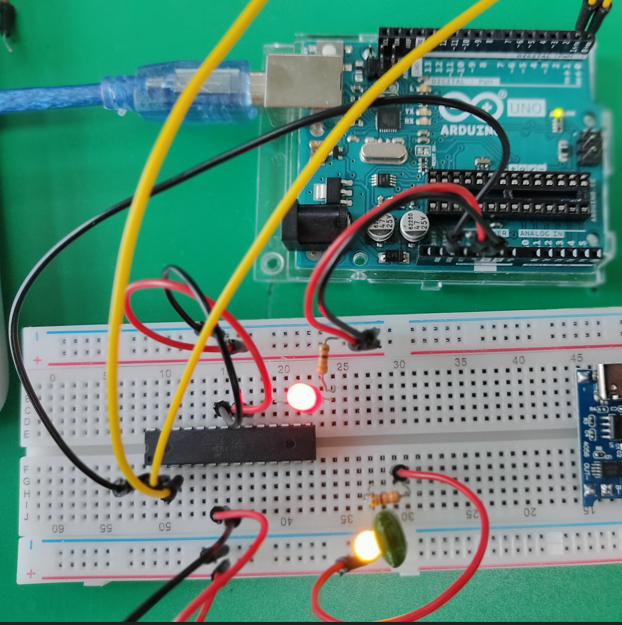
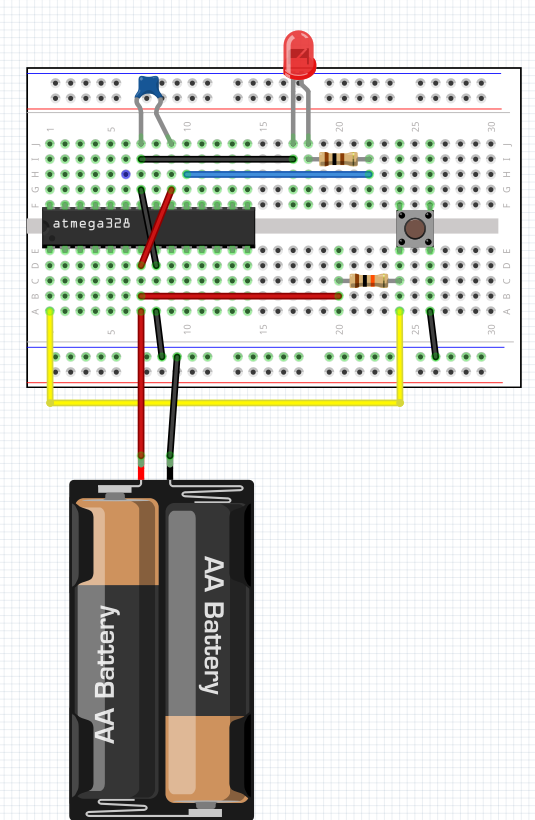
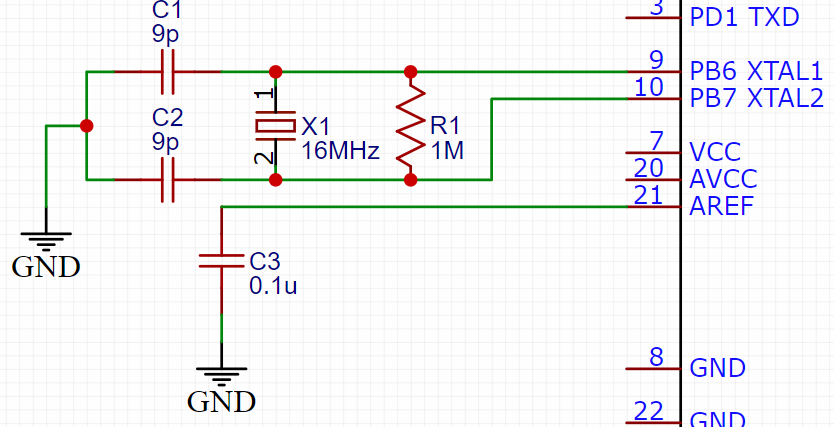
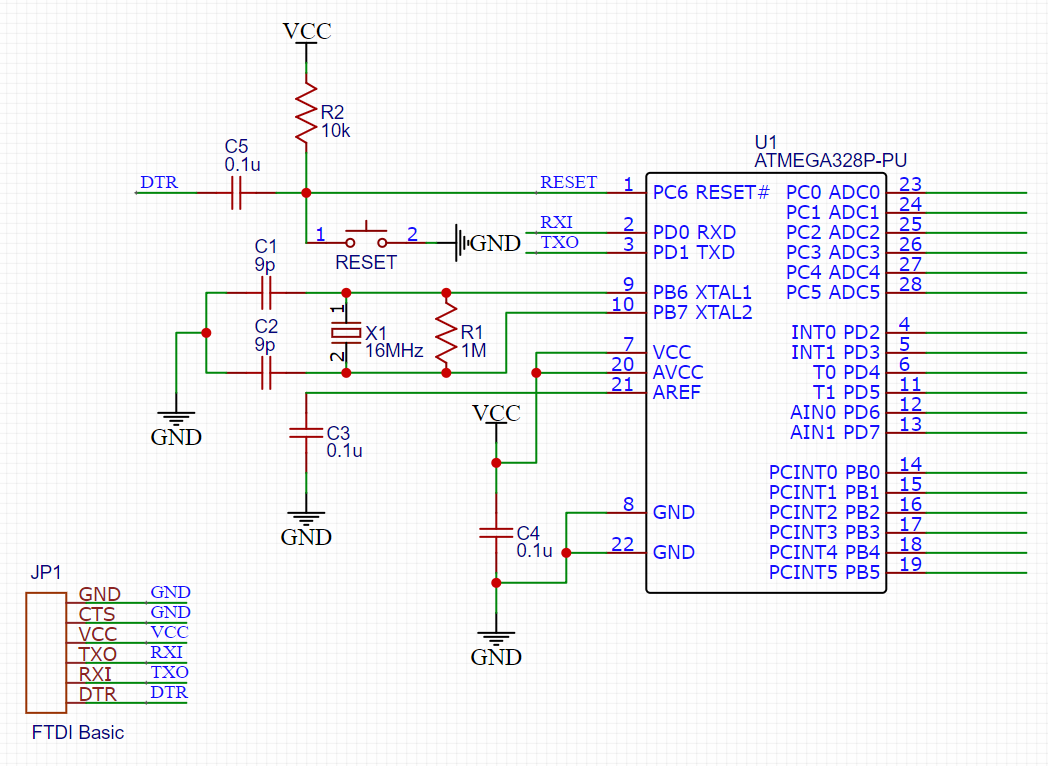
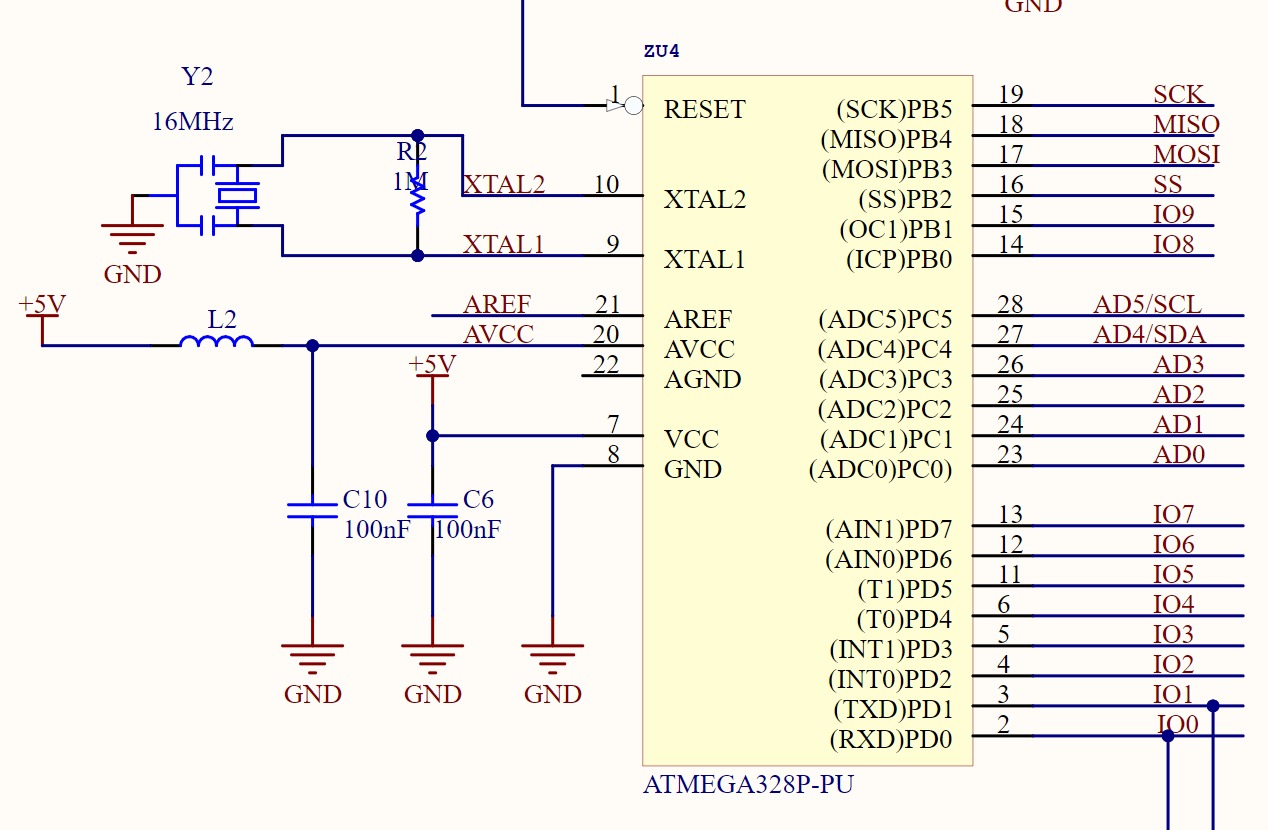
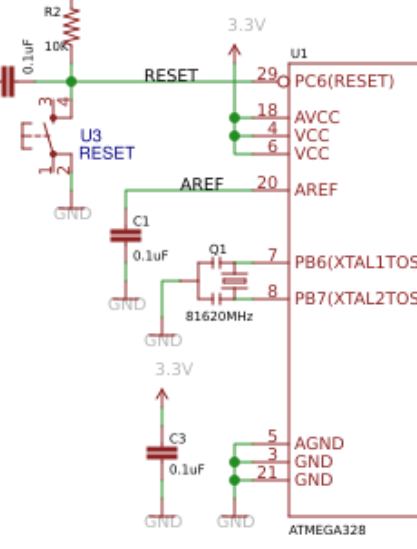
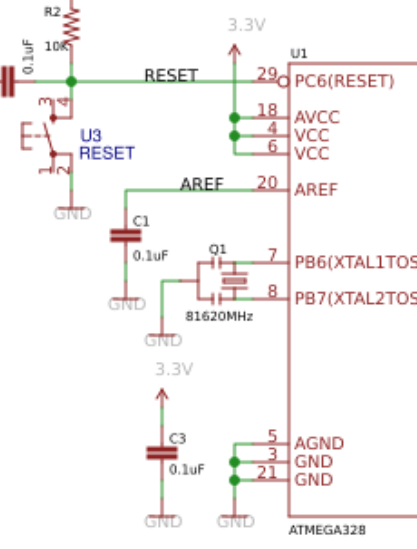
제가 만든 회로는 도두가이님의 회로와 비슷한 블링크 예제 회로를 만들었는데,
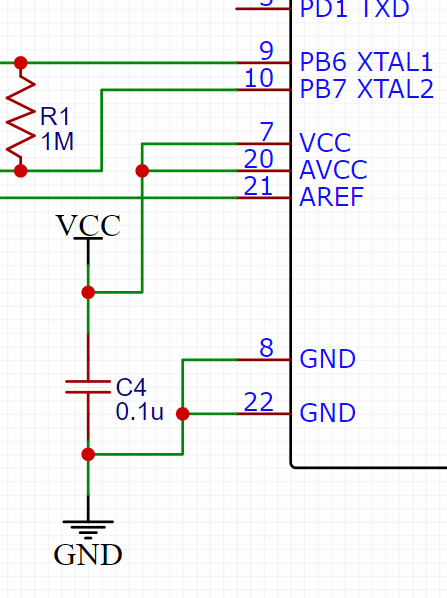
거기다가 바이패스 필터와 LED 전원 회로를 추가한 정도로 만들었습니다.
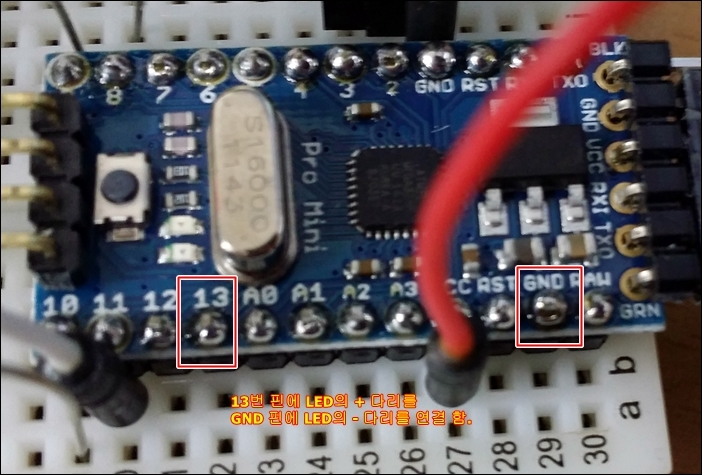
LED 위치도 스캐치 핀 번호에다가 12번을 줬구요.
그랬더니 동작하질 않았습니다.
https://m.blog.naver.com/PostView.naver?isHttpsRedirect=true&blogId=mapes_khkim&logNo=221890832646
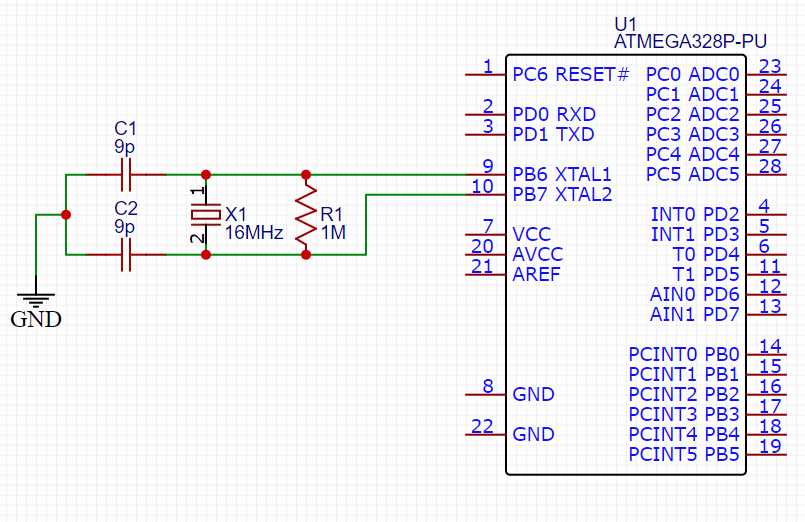
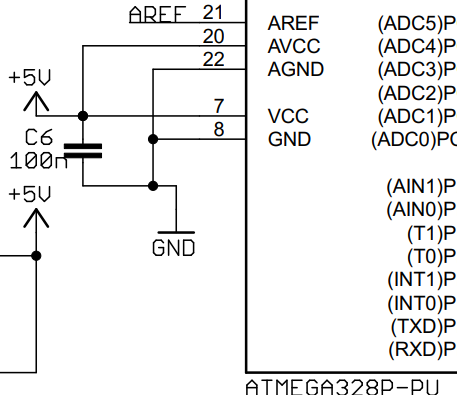
이상한건 코드를 업로딩한 ATMEGA328을 우노보드에다 꽂고 12번 핀과 LED를 연결하면 블링크가 잘되는데
ATMEGA328을 보드에다 꽂고 12번 핀 자리에다가 LED연결했더니 반응이 없었습니다.
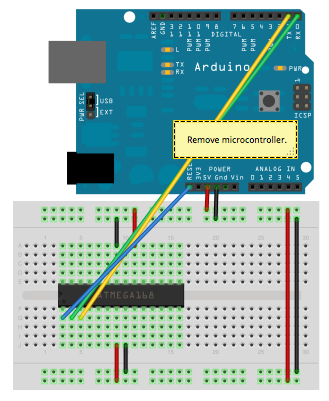
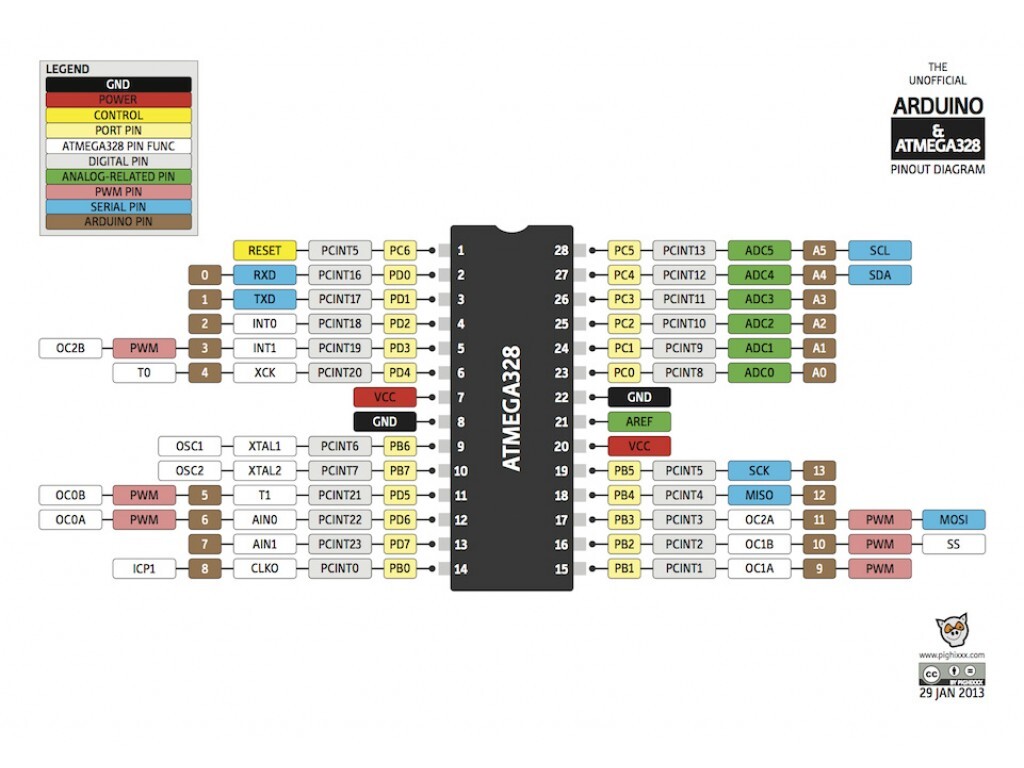
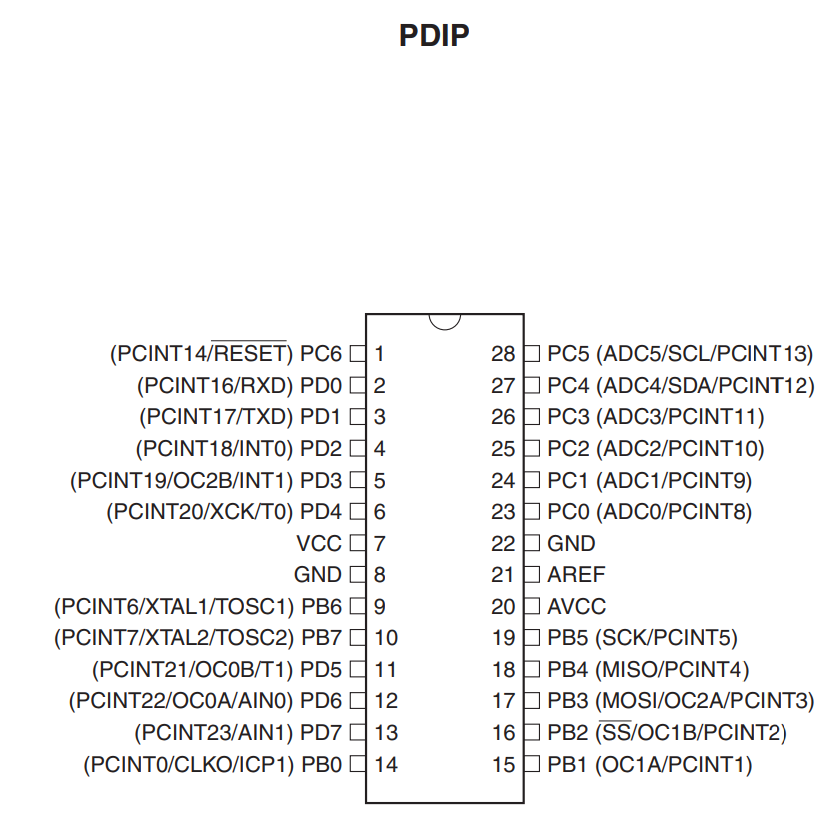
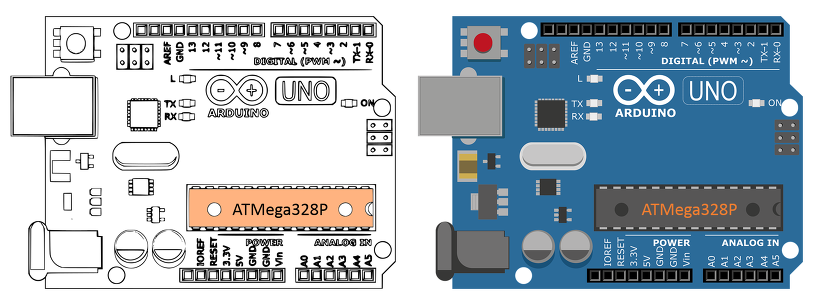
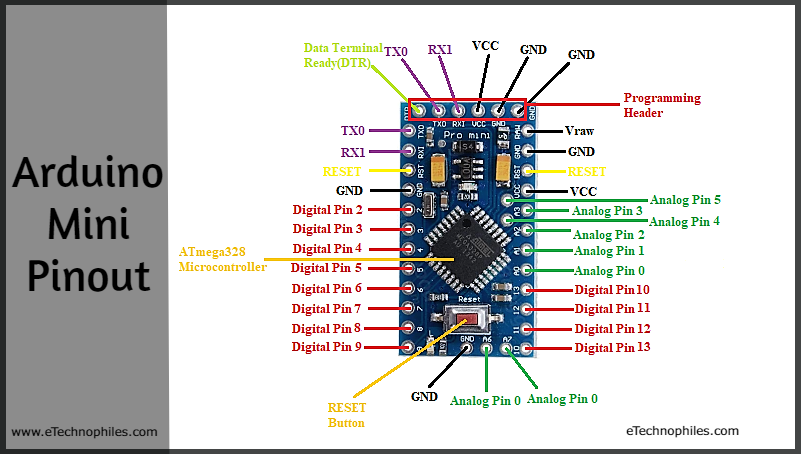
이걸 하루 지나서야 알았는데, 우노보드의 12번핀은 ATMEGA 328P에서는 달랐던걸 잊고있었죠.
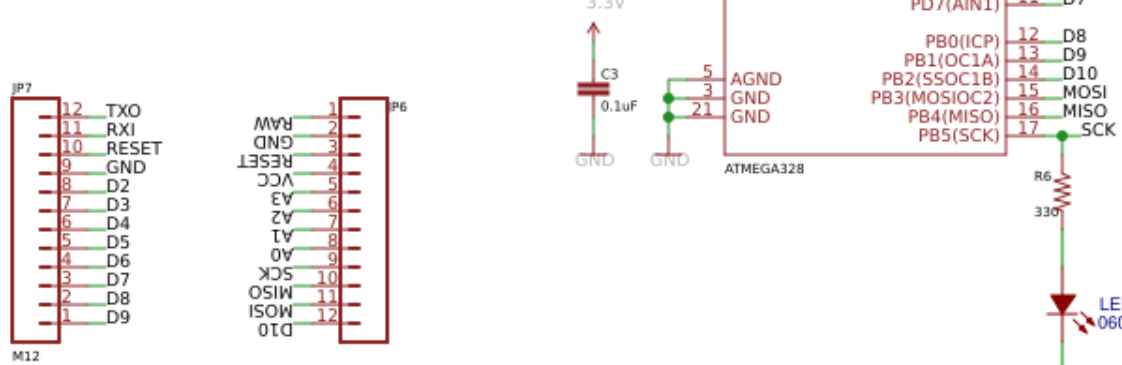
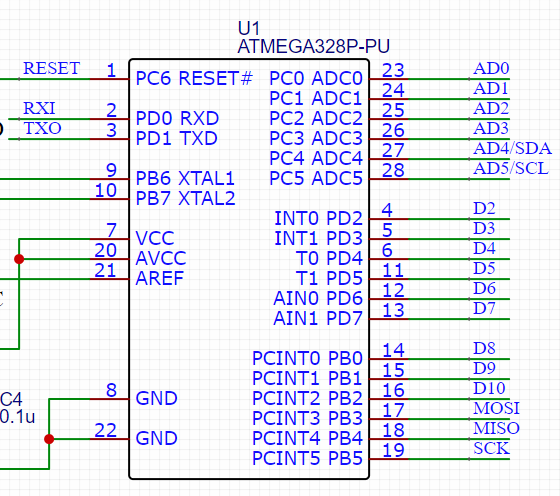
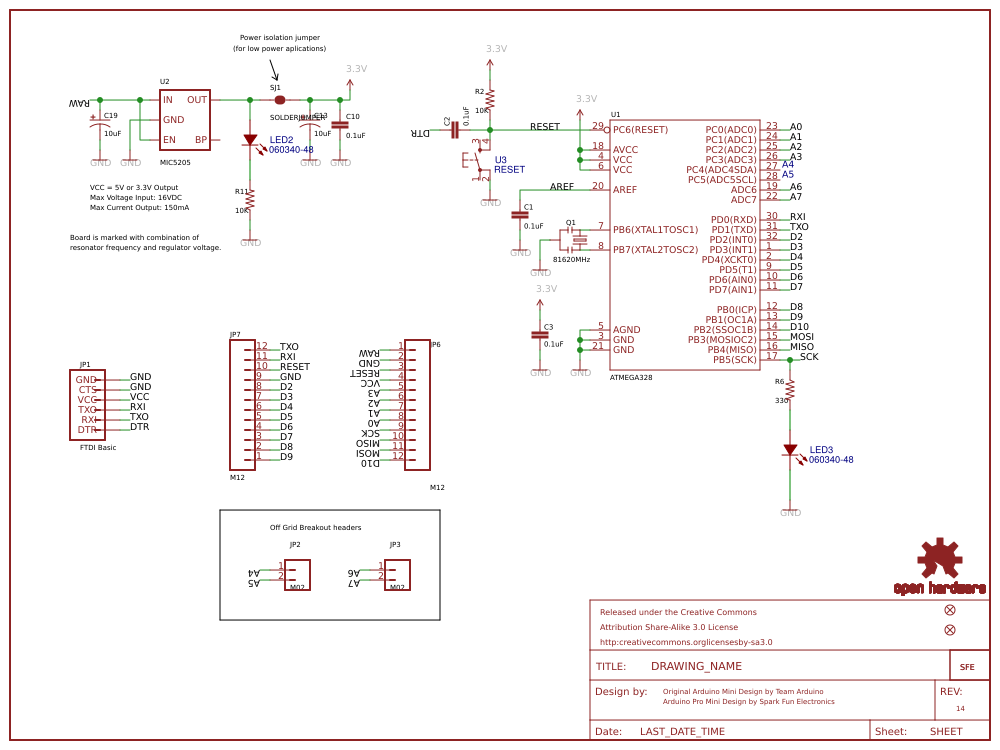
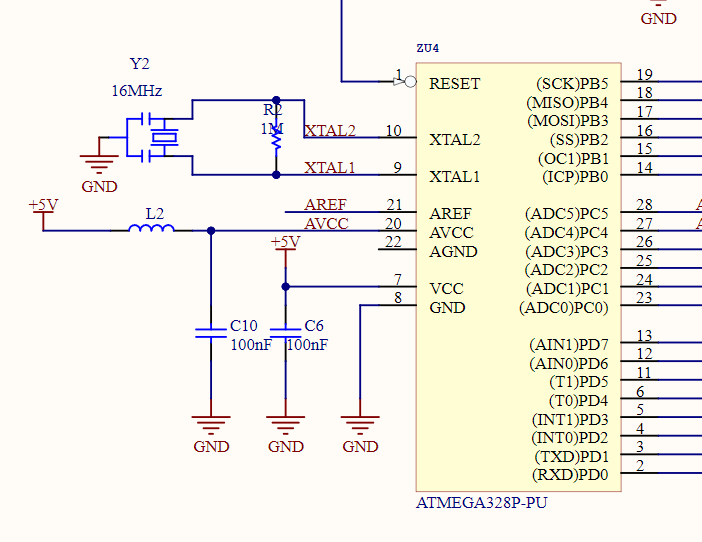
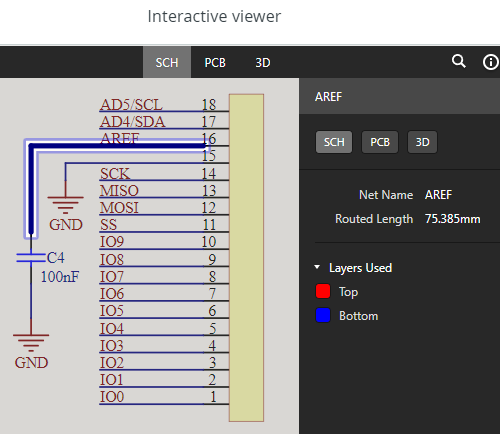
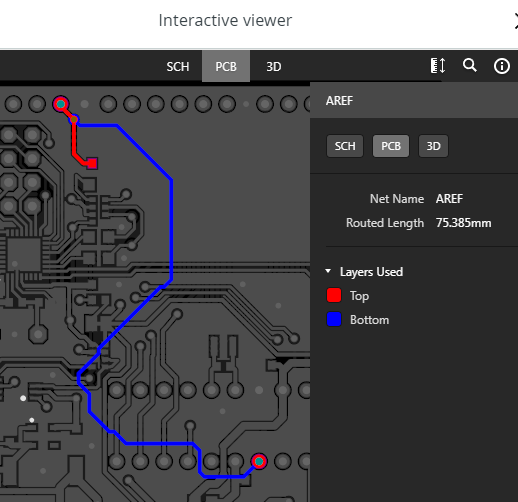
아래 그림을 보면 디지털핀 12번은 ATMEGA328P의 18번 핀과 연결되어 있습니다.
그러니까 빵판에는 18번핀과 LED를 연결해야했는데 그걸 잊고 엉뚱한곳에 연결해놔서 불이 안들어왔던 거구요.
https://stringfixer.com/files/27509185.jpg
회로도 그릴 체력은 없어서
그냥 녹화한걸 올리면
화면에 나온데로 외부 클럭이 없지만
내부 클럭만으로도 잘 동작합니다.
이건 기존 16MHz 외부 클럭 사용하는 기존 부트로더를 올린건데 코드는 내부 클럭쓴것과 같습니다.
크리스탈 진동자로 외부 클럭을 받아서 잘 동작하고,
다른건 위 베터리가 3.7 - 4.2V 정도라 16MHz 속도로 동작하려면 5v가 필요하다보니
베터리 대신 파워 서플라이로 공급하고 있습니다.
지난 주에는 방학하고 집청소 하느라 제대로 공부하지 못했는데
오랜만에 뭔가 해낸거같아서 뿌듯하기도하고
8월 3일날 전자산업기사 실기 시험이라 그거 좀 준비하다가
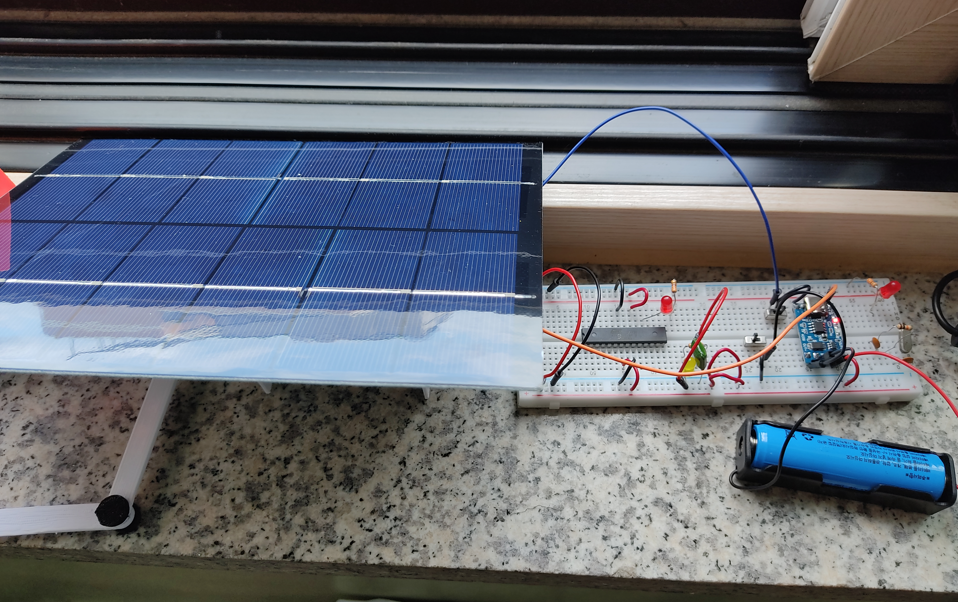
이후에 태양광 패널 사서 달던가 심플하게 피아노 구현을 해보려고합니다.