void SendData(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// if programming failed, don't try to do anything
if (!dmpReady) return;
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
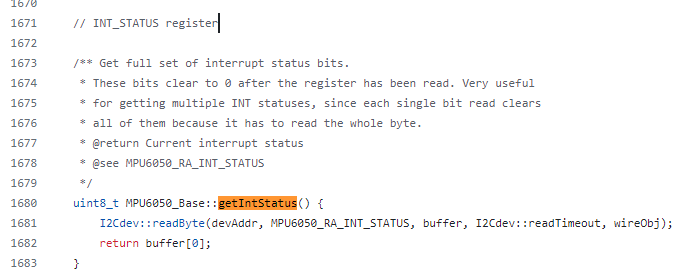
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
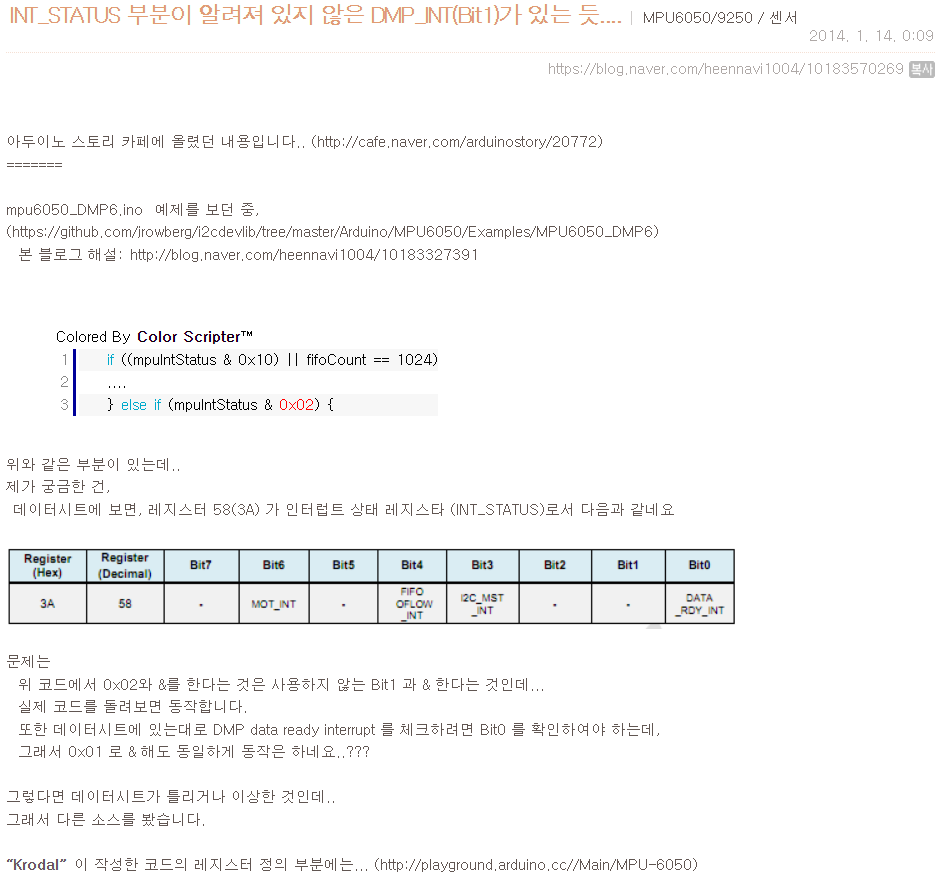
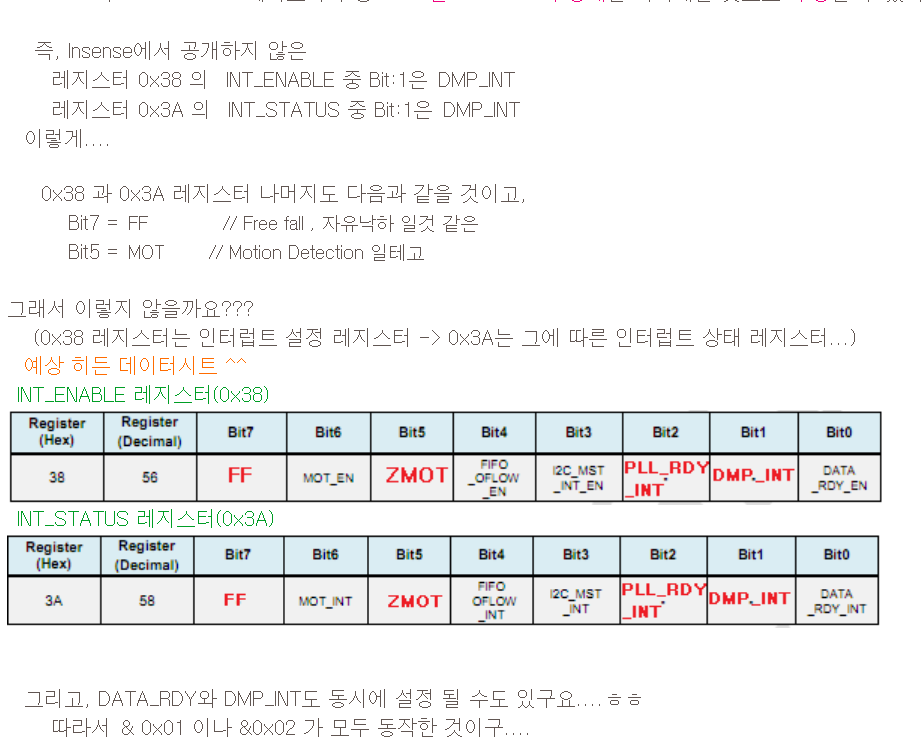
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
BTSerial.print(pinNum);
BTSerial.print(":");
BTSerial.print(int(ypr[0] * 180/M_PI));
BTSerial.print(",");
BTSerial.print(int(ypr[1] * 180/M_PI));
BTSerial.print(",");
BTSerial.print(int(ypr[2] * 180/M_PI));
BTSerial.print("/");
#endif
}
}
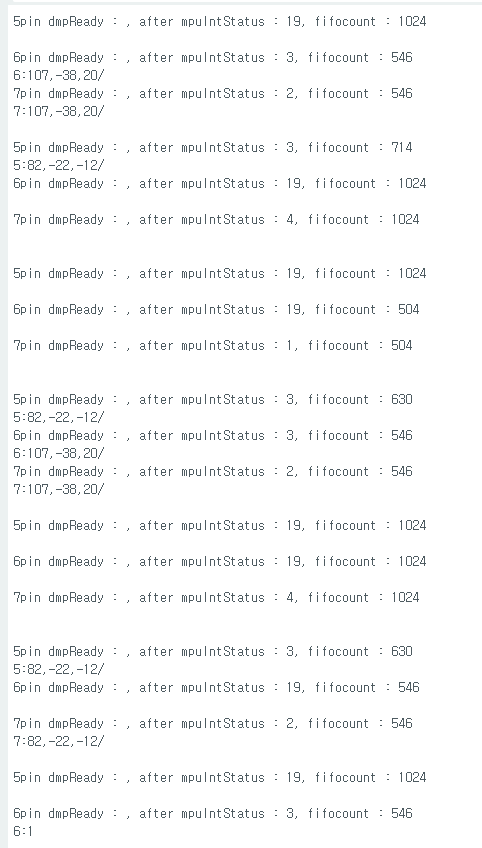
mpu 상태가져오기전에 사용되는 값들 출력시켜봣는데
Serial.println("");
Serial.print(pinNum);
Serial.print("pin dmpReady : ");
Serial.print(dmpReady);
Serial.print(", before mpuInterrupt : ");
Serial.print(mpuInterrupt);
Serial.print(", fifocount : ");
Serial.println(fifoCount);
// if programming failed, don't try to do anything
if (!dmpReady) return;
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
이것만으로 어쩔때 나오고 어쩔때 안나오는지 판단할수가 없엇음.
이번에는
상태랑 피포카운트 출력하도록 수정
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
Serial.print(", after mpuIntStatus : ");
Serial.print(mpuIntStatus);
Serial.print(", fifocount : ");
Serial.println(fifoCount);
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print(pinNum);
Serial.print(":");
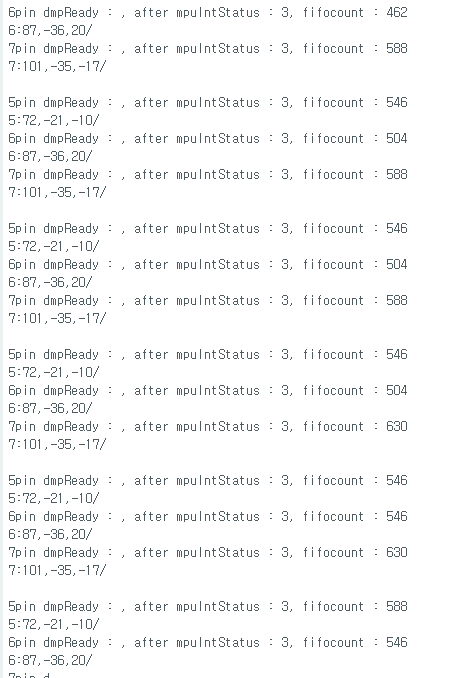
위 코드 대로 mpuIntStatus 가 2일때만 진입해서 출력하는걸 확인
2 외에
1, 3, 4, 19가 자주 발생한다.
잠깐 지금 보니 6, 7때 같은값을 가져오고있었네
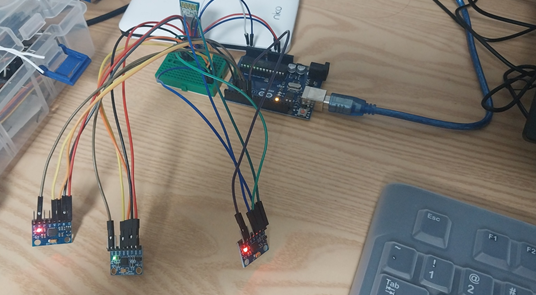
mpu3개 연결했는데
루프문을 몇군대 잘못하기도하고
세번째 mpu를 반대로 놓거나
핀아웃을 안해놔서 안떳다.
거기다가 블루투스때문에 보드레이트를 9600 해놨었는데
115200으로 했을때 더 잘나온다.
//RXD3, TXD4
SoftwareSerial BTSerial(4, 3);
int mpuPinNums[] = {5, 6, 7};
int mpuNum = sizeof(mpuPinNums) / sizeof(int);
void InitMPU(int pinNum);
void SendData(int pinNum);
void setup() {
for (int i = 0; i < mpuNum;i++)
pinMode(mpuPinNums[i], OUTPUT);
Serial.begin(115200);
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
TWBR = 24; // 400kHz I2C clock (200kHz if CPU is 8MHz)
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
while (!Serial); // wait for Leonardo enumeration, others continue immediately
for (int i = 0; i < mpuNum;i++)
InitMPU(mpuPinNums[i]);
}
void loop() {
for (int i = 0; i < mpuNum;i++)
SendData(mpuPinNums[i]);
Serial.println("");
}
void InitMPU(int pinNum)
{
for (int i = 0; i < mpuNum; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(pinNum, LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
Serial.print("start init pin ");
Serial.println(pinNum);
// initialize device
mpu.initialize();
// verify connection
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// load and configure the DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
//attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
}
void SendData(int pinNum)
{
for (int i = 0; i < mpuNum; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
Serial.println("");
Serial.print(pinNum);
Serial.print("pin dmpReady : ");
// if programming failed, don't try to do anything
if (!dmpReady) return;
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
Serial.print(", after mpuIntStatus : ");
Serial.print(mpuIntStatus);
Serial.print(", fifocount : ");
Serial.println(fifoCount);
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print(pinNum);
Serial.print(":");
Serial.print(int(ypr[0] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[1] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[2] * 180/M_PI));
Serial.print("/");
#endif
}
}
#include "I2Cdev.h"
#include <SoftwareSerial.h>
#include "MPU6050_6Axis_MotionApps20.h"
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
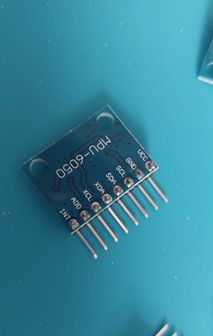
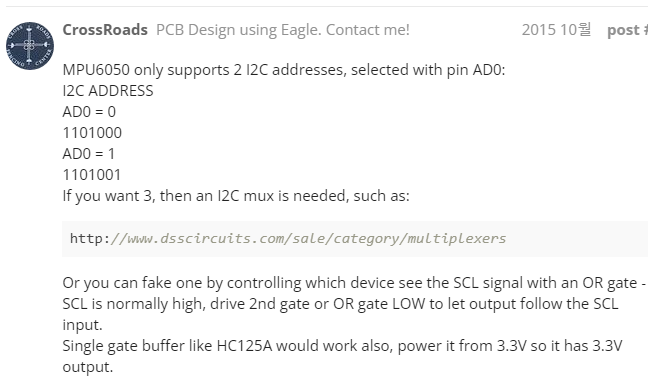
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for SparkFun breakout and InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 mpu;
//MPU6050 mpu(0x69); // <-- use for AD0 high
#define OUTPUT_READABLE_YAWPITCHROLL
#define LED_PIN 13 // (Arduino is 13, Teensy is 11, Teensy++ is 6)
bool blinkState = false;
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorInt16 aa; // [x, y, z] accel sensor measurements
VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements
VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements
VectorFloat gravity; // [x, y, z] gravity vector
float euler[3]; // [psi, theta, phi] Euler angle container
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
// packet structure for InvenSense teapot demo
uint8_t teapotPacket[14] = { '$', 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\r', '\n' };
volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high
void dmpDataReady() {
mpuInterrupt = true;
}
//RXD3, TXD4
SoftwareSerial BTSerial(4, 3);
int mpuPinNums[] = {5, 6};
void InitMPU(int pinNum);
void SendData(int pinNum);
void setup() {
pinMode(5, OUTPUT);//MPU #1
pinMode(6, OUTPUT);//MPU #2
Serial.begin(115200);
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
TWBR = 24; // 400kHz I2C clock (200kHz if CPU is 8MHz)
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
while (!Serial); // wait for Leonardo enumeration, others continue immediately
for (int i = 0; i<2; i++)
InitMPU(mpuPinNums[i]);
}
void loop() {
for (int i = 0; i<2; i++)
SendData(mpuPinNums[i]);
Serial.println("");
delay(100);
}
void InitMPU(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(pinNum, LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
Serial.print("start init pin ");
Serial.println(pinNum);
// initialize device
mpu.initialize();
// verify connection
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// load and configure the DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
//attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
}
void SendData(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// if programming failed, don't try to do anything
if (!dmpReady) return;
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print(pinNum);
Serial.print(":");
Serial.print(int(ypr[0] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[1] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[2] * 180/M_PI));
Serial.print("/");
#endif
}
}
기존의 초기화, 각 가져오는 코드는 따로빼고
AD0 핀들 output 설정
int mpuPinNums[] = {5, 6};
void InitMPU(int pinNum);
void SendData(int pinNum);
void setup() {
pinMode(5, OUTPUT);//MPU #1
pinMode(6, OUTPUT);//MPU #2
Serial.begin(115200);
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
TWBR = 24; // 400kHz I2C clock (200kHz if CPU is 8MHz)
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
while (!Serial); // wait for Leonardo enumeration, others continue immediately
for (int i = 0; i<2; i++)
InitMPU(mpuPinNums[i]);
}
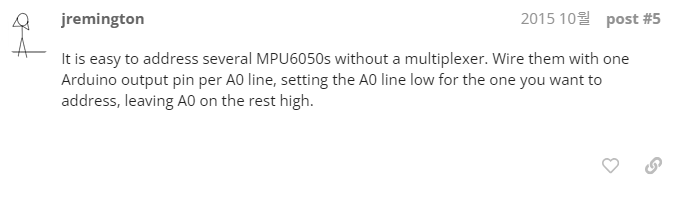
초기화 코드에서는
모든 mpu를 돌아가면서 초기화하는데
선택된 mpu만 주소를 0x68로 설정하고 수행
나머지는 초기화전 0x69로 설정
void InitMPU(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(pinNum, LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
Serial.print("start init pin ");
Serial.println(pinNum);
// initialize device
mpu.initialize();
// verify connection
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// load and configure the DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
//attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
}
루프의 경우 각 mpu 돌아가면서 각 출력하고 딜레이 주는식으로 정리
void loop() {
for (int i = 0; i<2; i++)
SendData(mpuPinNums[i]);
Serial.println("");
delay(50);
}
senddata의 경우
초기화때와 마찬가지로 선택된 mpu만 가져오도록 설정
void SendData(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// if programming failed, don't try to do anything
if (!dmpReady) return;
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print(pinNum);
Serial.print(":");
Serial.print(int(ypr[0] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[1] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[2] * 180/M_PI));
Serial.print("/");
#endif
}
}
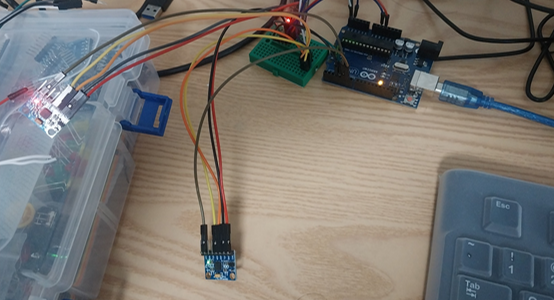
이 코드는 배터리가 아닌 PC전원으로 쓰면서
115200 시리얼 통신으로 가져와 쓰드록 정리
#include "I2Cdev.h"
#include <SoftwareSerial.h>
#include "MPU6050_6Axis_MotionApps20.h"
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for SparkFun breakout and InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 mpu;
//MPU6050 mpu(0x69); // <-- use for AD0 high
#define OUTPUT_READABLE_YAWPITCHROLL
#define LED_PIN 13 // (Arduino is 13, Teensy is 11, Teensy++ is 6)
bool blinkState = false;
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorInt16 aa; // [x, y, z] accel sensor measurements
VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements
VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements
VectorFloat gravity; // [x, y, z] gravity vector
float euler[3]; // [psi, theta, phi] Euler angle container
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
// packet structure for InvenSense teapot demo
uint8_t teapotPacket[14] = { '$', 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\r', '\n' };
volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high
void dmpDataReady() {
mpuInterrupt = true;
}
//RXD3, TXD4
SoftwareSerial BTSerial(4, 3);
int mpuPinNums[] = {5, 6};
void InitMPU(int pinNum);
void SendData(int pinNum);
void setup() {
pinMode(5, OUTPUT);//MPU #1
pinMode(6, OUTPUT);//MPU #2
Serial.begin(115200);
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
TWBR = 24; // 400kHz I2C clock (200kHz if CPU is 8MHz)
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
while (!Serial); // wait for Leonardo enumeration, others continue immediately
for (int i = 0; i<2; i++)
InitMPU(mpuPinNums[i]);
}
void loop() {
for (int i = 0; i<2; i++)
SendData(mpuPinNums[i]);
Serial.println("");
delay(50);
}
void InitMPU(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(pinNum, LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
Serial.print("start init pin ");
Serial.println(pinNum);
// initialize device
mpu.initialize();
// verify connection
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// load and configure the DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
//attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
}
void SendData(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// if programming failed, don't try to do anything
if (!dmpReady) return;
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print(pinNum);
Serial.print(":");
Serial.print(int(ypr[0] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[1] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[2] * 180/M_PI));
Serial.print("/");
#endif
}
}
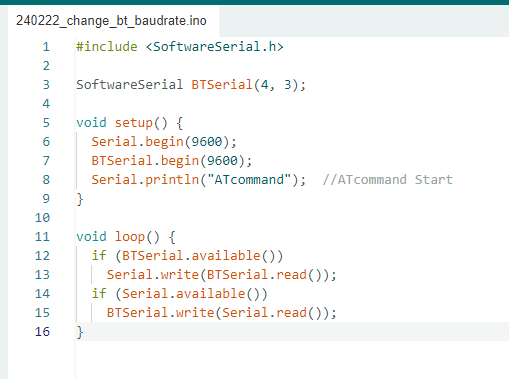
이번엔 블루투스로 변경
딜레이 100주면 115200 써도 되나모르겟다.
안되서 9600으로 다시진행
#include "I2Cdev.h"
#include <SoftwareSerial.h>
#include "MPU6050_6Axis_MotionApps20.h"
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for SparkFun breakout and InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 mpu;
//MPU6050 mpu(0x69); // <-- use for AD0 high
#define OUTPUT_READABLE_YAWPITCHROLL
#define LED_PIN 13 // (Arduino is 13, Teensy is 11, Teensy++ is 6)
bool blinkState = false;
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorInt16 aa; // [x, y, z] accel sensor measurements
VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements
VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements
VectorFloat gravity; // [x, y, z] gravity vector
float euler[3]; // [psi, theta, phi] Euler angle container
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
// packet structure for InvenSense teapot demo
uint8_t teapotPacket[14] = { '$', 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\r', '\n' };
volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high
void dmpDataReady() {
mpuInterrupt = true;
}
//RXD3, TXD4
SoftwareSerial BTSerial(4, 3);
int mpuPinNums[] = {5, 6};
void InitMPU(int pinNum);
void SendData(int pinNum);
void setup() {
pinMode(5, OUTPUT);//MPU #1
pinMode(6, OUTPUT);//MPU #2
BTSerial.begin(9600);
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
TWBR = 24; // 400kHz I2C clock (200kHz if CPU is 8MHz)
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
while (!Serial); // wait for Leonardo enumeration, others continue immediately
InitMPU(5);
InitMPU(6);
}
void loop() {
SendData(5);
SendData(6);
BTSerial.println("");
delay(100);
}
void InitMPU(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(pinNum, LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
BTSerial.print("start init pin ");
BTSerial.println(pinNum);
// initialize device
mpu.initialize();
// verify connection
BTSerial.println(F("Testing device connections..."));
BTSerial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// load and configure the DMP
BTSerial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
BTSerial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
BTSerial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
//attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
BTSerial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
BTSerial.print(F("DMP Initialization failed (code "));
BTSerial.print(devStatus);
BTSerial.println(F(")"));
}
}
void SendData(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// if programming failed, don't try to do anything
if (!dmpReady) return;
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
BTSerial.print(pinNum);
BTSerial.print(":");
BTSerial.print(int(ypr[0] * 180/M_PI));
BTSerial.print(",");
BTSerial.print(int(ypr[1] * 180/M_PI));
BTSerial.print(",");
BTSerial.print(int(ypr[2] * 180/M_PI));
BTSerial.print("/");
#endif
}
}