#include "I2Cdev.h"
#include <map>
#include "MPU6050_6Axis_MotionApps20.h"
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
MPU6050 mpu;
#define OUTPUT_READABLE_YAWPITCHROLL
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorInt16 aa; // [x, y, z] accel sensor measurements
VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements
VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements
VectorFloat gravity; // [x, y, z] gravity vector
float euler[3]; // [psi, theta, phi] Euler angle container
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high
void dmpDataReady() {
mpuInterrupt = true;
}
#include "BluetoothSerial.h"
String device_name = "ESP32-BT-Slave";
// Check if Bluetooth is available
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Check Serial Port Profile
#if !defined(CONFIG_BT_SPP_ENABLED)
#error Serial Port Profile for Bluetooth is not available or not enabled. It is only available for the ESP32 chip.
#endif
BluetoothSerial BTSerial;
int mpuPinNums[] = {32, 33, 25};
int mpuNum = sizeof(mpuPinNums) / sizeof(int);
struct YPR
{
int ypr[3];
};
std::map<int, YPR> yprMap;
void InitMPU(int pinNum);
void GetData(int pinNum);
void SendData();
void setup() {
//Serial.begin(115200);
BTSerial.begin(device_name); //Bluetooth device name
YPR zeroYpr = {0, 0, 0};
for(int i = 0; i < mpuNum; i++)
yprMap.insert(std::pair<int,YPR>(mpuPinNums[i], zeroYpr));
BTSerial.print("start init mpuNum : ");
BTSerial.println(mpuNum);
for (int i = 0; i < mpuNum;i++)
{
BTSerial.print("set pin output : ");
BTSerial.println(mpuPinNums[i]);
pinMode(mpuPinNums[i], OUTPUT);
}
// join I2C bus (I2Cdev library doesn't do this automatically)
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
Wire.setClock(400000); // 400kHz I2C clock. Comment this line if having compilation difficulties
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
for (int i = 0; i < mpuNum;i++)
InitMPU(mpuPinNums[i]);
}
void loop() {
for (int i = 0; i < mpuNum;i++)
GetData(mpuPinNums[i]);
SendData();
}
void InitMPU(int pinNum)
{
for (int i = 0; i < mpuNum; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// initialize device
mpu.initialize();
// verify connection
BTSerial.println(F("Testing device connections..."));
BTSerial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// load and configure the DMP
BTSerial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
BTSerial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
BTSerial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
//attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
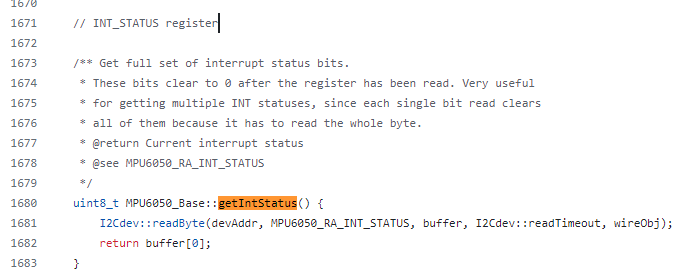
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
BTSerial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
BTSerial.print(F("DMP Initialization failed (code "));
BTSerial.print(devStatus);
BTSerial.println(F(")"));
}
}
void GetData(int pinNum)
{
for (int i = 0; i < mpuNum; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// if programming failed, don't try to do anything
if (!dmpReady) return;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
fifoCount -= packetSize;
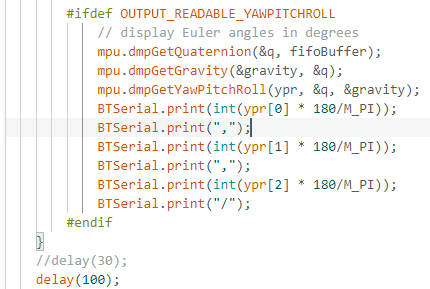
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
YPR tmpYpr;
tmpYpr.ypr[0] = int(ypr[0] * 180/M_PI);
tmpYpr.ypr[1] = int(ypr[1] * 180/M_PI);
tmpYpr.ypr[2] = int(ypr[2] * 180/M_PI);
yprMap[pinNum] = tmpYpr;
#endif
}
}
void SendData()
{
for (int i = 0; i < mpuNum; i++)
{
BTSerial.print(yprMap[mpuPinNums[i]].ypr[0]);
BTSerial.print(",");
BTSerial.print(yprMap[mpuPinNums[i]].ypr[1]);
BTSerial.print(",");
BTSerial.print(yprMap[mpuPinNums[i]].ypr[2]);
if(i == mpuNum - 1)
BTSerial.print("/");
else
BTSerial.print(":");
}
}
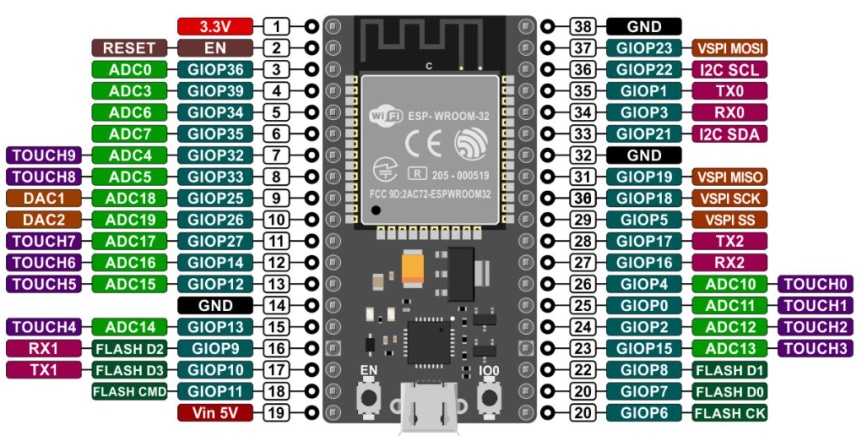
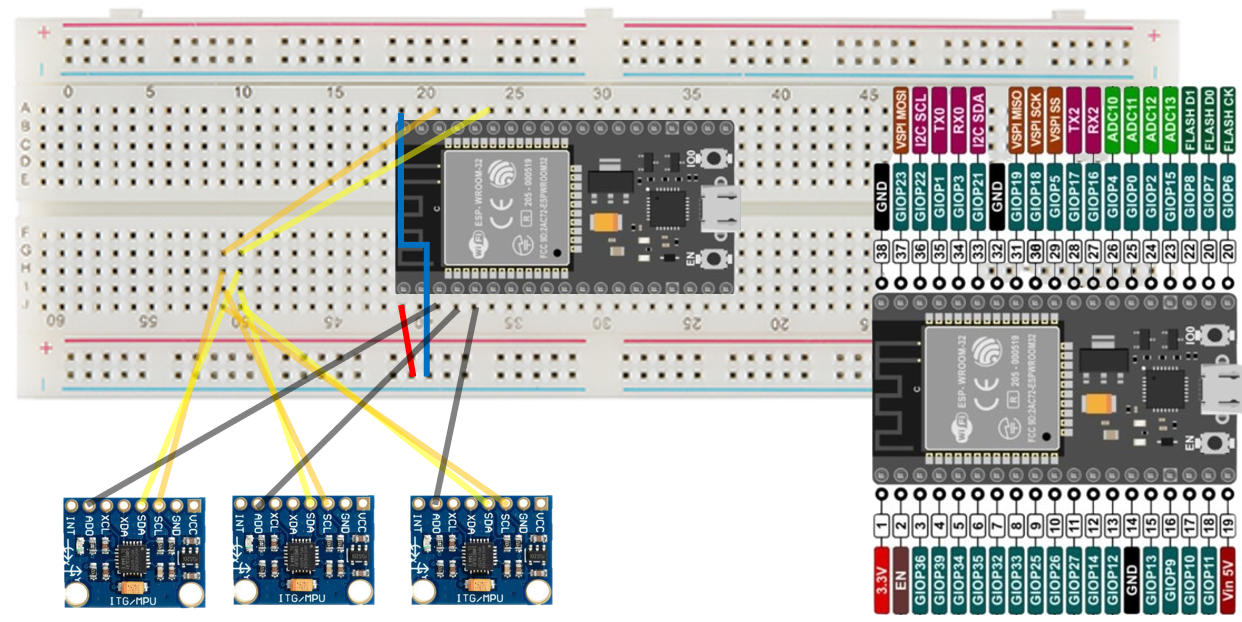
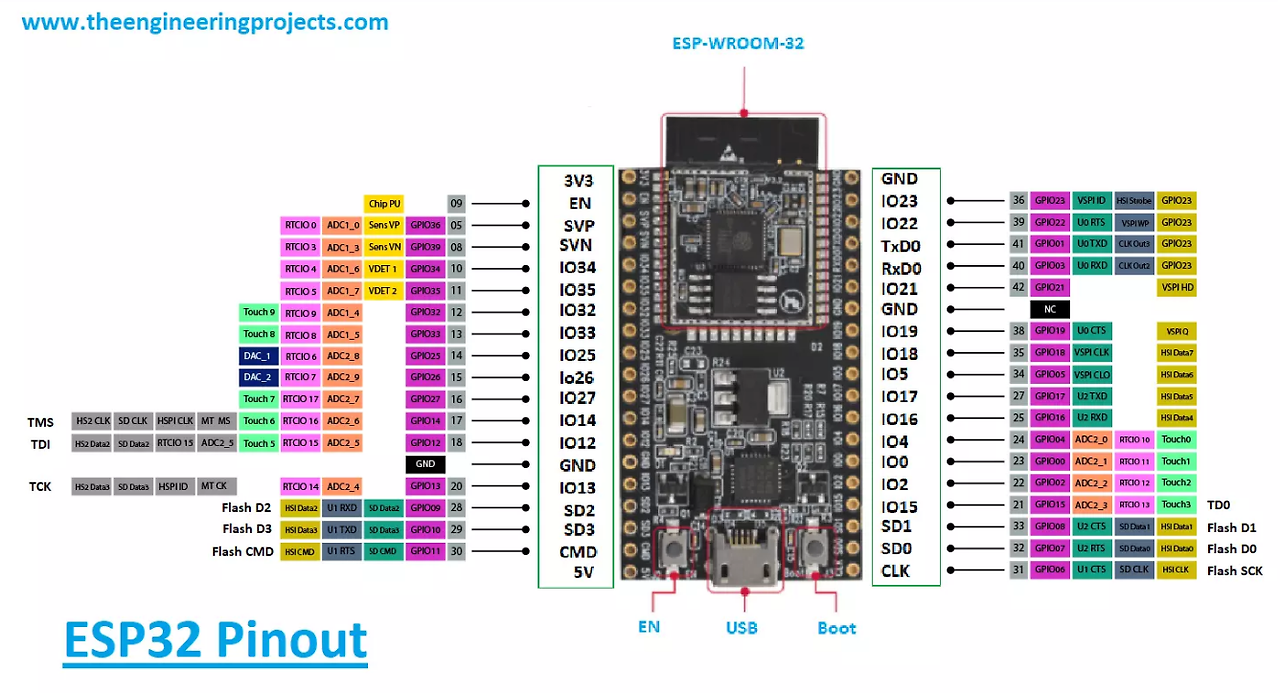
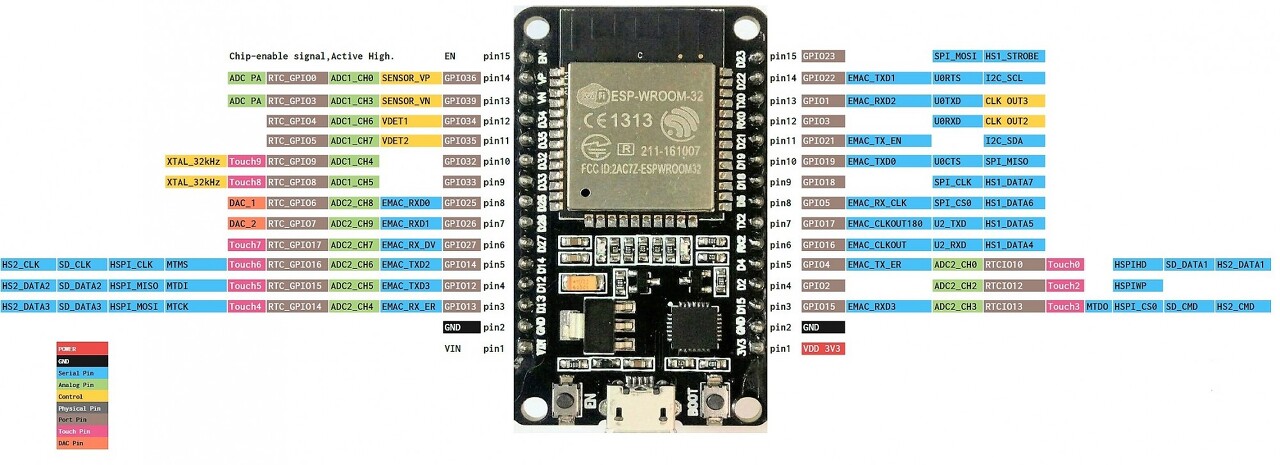
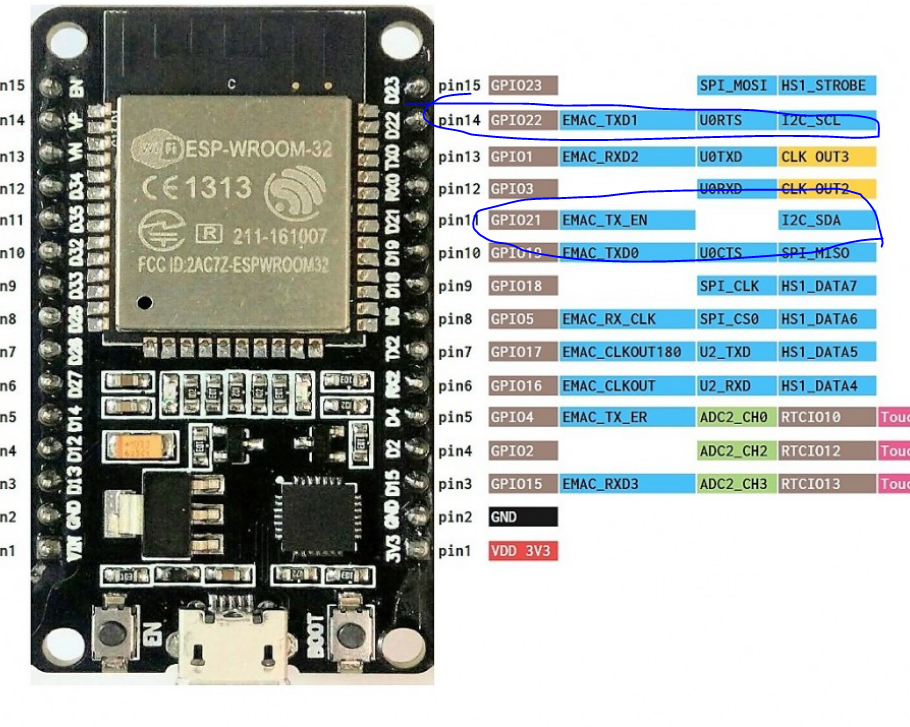
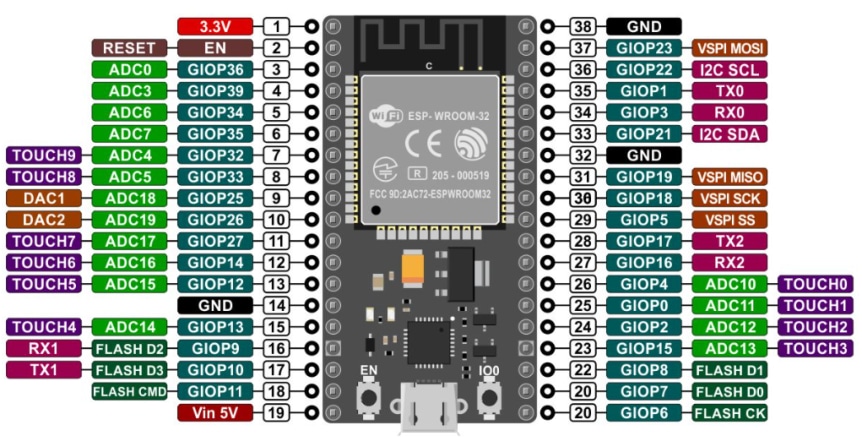
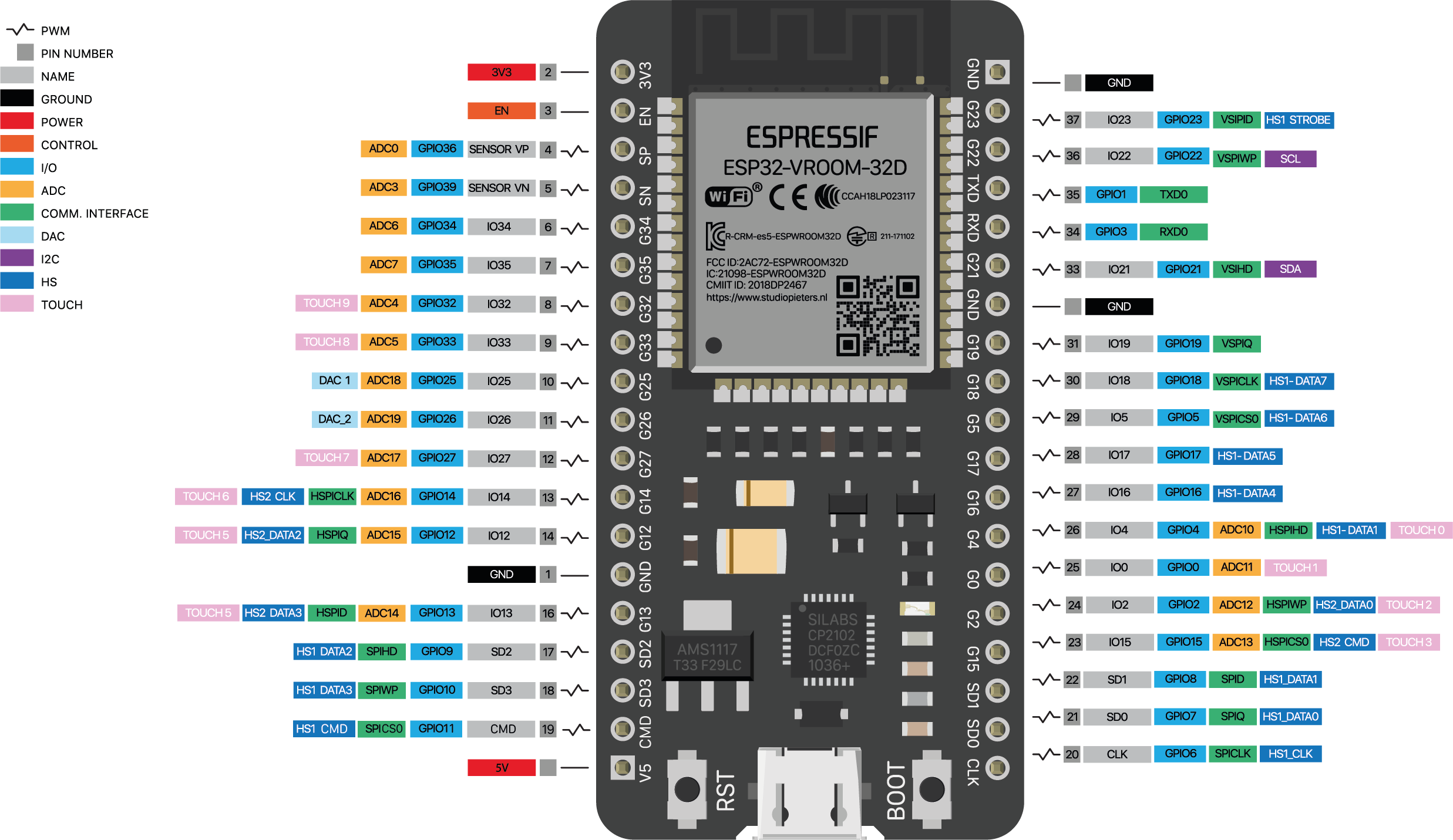
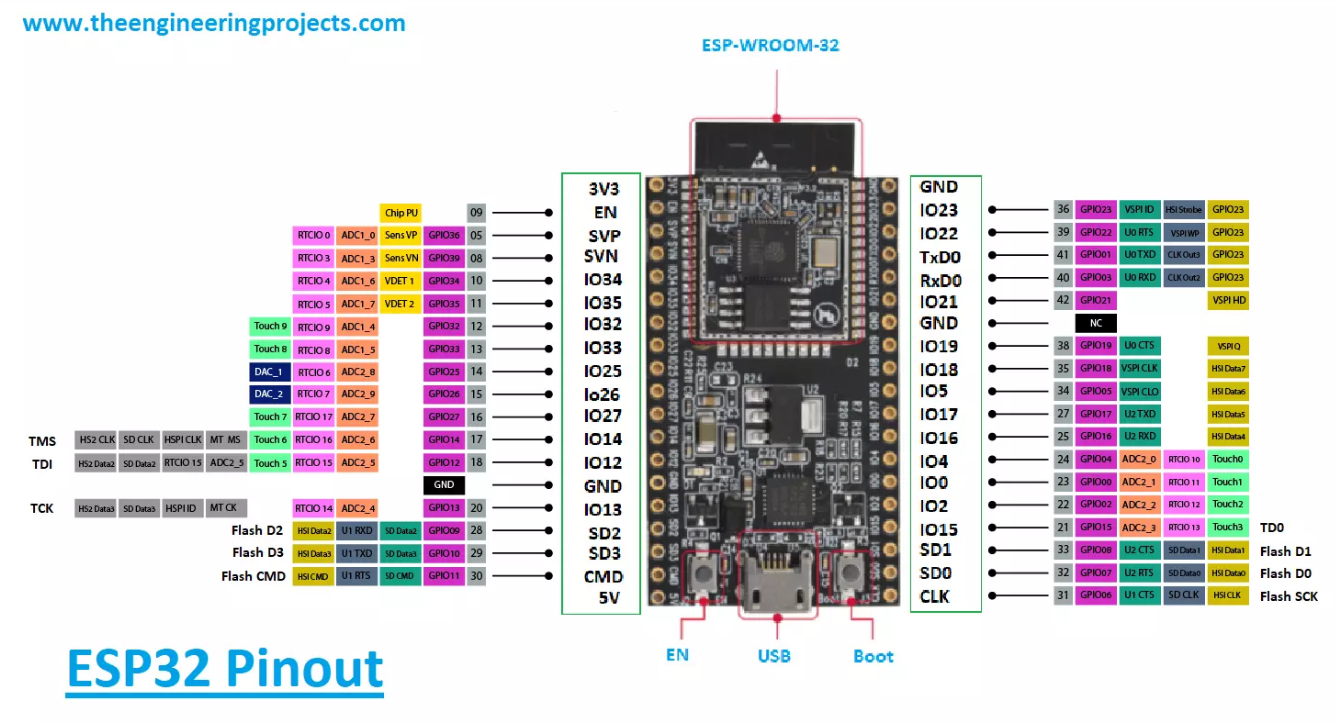
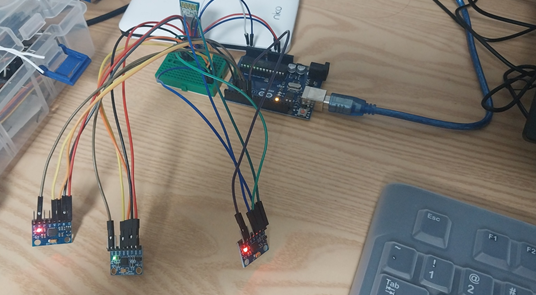
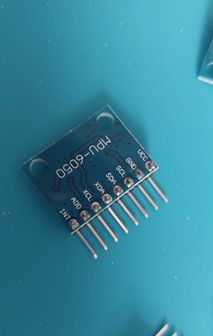
근데 ESP32 38핀 짜리 GPIO는 번호가 순서대로 가느네 아니라 뒤죽박죽 되있어서 좀햇갈리긴한다.
아쉬운데로 파워포인트로 대충 선 그렸는데
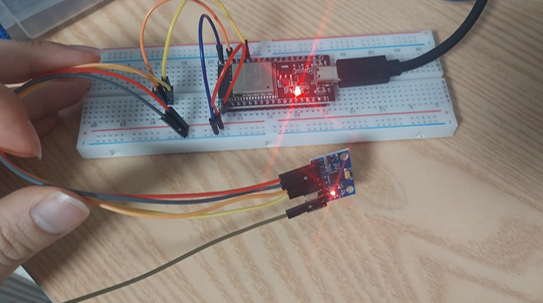
이런 느낌으로 배선하고
(mpu6050 vcc, gnd 제외)
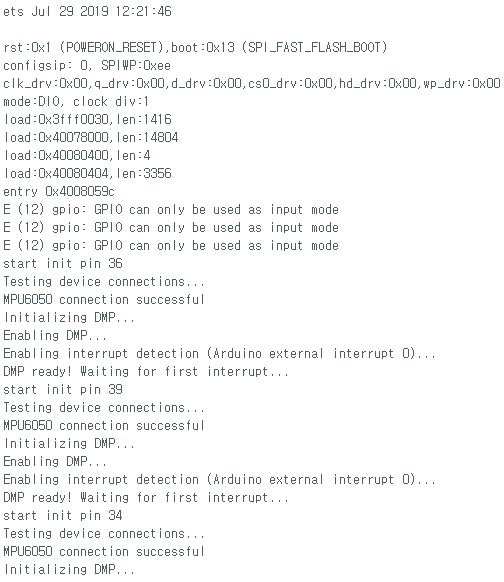
이전 코드 참고해서 만들었는데
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for SparkFun breakout and InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 mpu;
//MPU6050 mpu(0x69); // <-- use for AD0 high
#define OUTPUT_READABLE_YAWPITCHROLL
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorInt16 aa; // [x, y, z] accel sensor measurements
VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements
VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements
VectorFloat gravity; // [x, y, z] gravity vector
float euler[3]; // [psi, theta, phi] Euler angle container
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high
void dmpDataReady() {
mpuInterrupt = true;
}
#include "BluetoothSerial.h"
String device_name = "ESP32-BT-Slave";
// Check if Bluetooth is available
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Check Serial Port Profile
#if !defined(CONFIG_BT_SPP_ENABLED)
#error Serial Port Profile for Bluetooth is not available or not enabled. It is only available for the ESP32 chip.
#endif
BluetoothSerial BTSerial;
int mpuPinNums[] = {36, 39, 34};
int mpuNum = sizeof(mpuPinNums) / sizeof(int);
void InitMPU(int pinNum);
void SendData(int pinNum);
void setup() {
Serial.begin(115200);
BTSerial.begin(device_name); //Bluetooth device name
for (int i = 0; i < mpuNum;i++)
pinMode(mpuPinNums[i], OUTPUT);
// join I2C bus (I2Cdev library doesn't do this automatically)
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
Wire.setClock(400000); // 400kHz I2C clock. Comment this line if having compilation difficulties
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
for (int i = 0; i < mpuNum;i++)
InitMPU(mpuPinNums[i]);
}
void loop() {
for (int i = 0; i < mpuNum;i++)
SendData(mpuPinNums[i]);
Serial.println("");
}
void InitMPU(int pinNum)
{
for (int i = 0; i < mpuNum; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
Serial.print("start init pin ");
Serial.println(pinNum);
// initialize device
mpu.initialize();
// verify connection
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// load and configure the DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
//attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
}
void SendData(int pinNum)
{
for (int i = 0; i < mpuNum; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// if programming failed, don't try to do anything
if (!dmpReady) return;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print(pinNum);
Serial.print(":");
Serial.print(int(ypr[0] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[1] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[2] * 180/M_PI));
Serial.print("/");
#endif
}
}
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for SparkFun breakout and InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 mpu;
//MPU6050 mpu(0x69); // <-- use for AD0 high
#define OUTPUT_READABLE_YAWPITCHROLL
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorInt16 aa; // [x, y, z] accel sensor measurements
VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements
VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements
VectorFloat gravity; // [x, y, z] gravity vector
float euler[3]; // [psi, theta, phi] Euler angle container
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high
void dmpDataReady() {
mpuInterrupt = true;
}
#include "BluetoothSerial.h"
String device_name = "ESP32-BT-Slave";
// Check if Bluetooth is available
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Check Serial Port Profile
#if !defined(CONFIG_BT_SPP_ENABLED)
#error Serial Port Profile for Bluetooth is not available or not enabled. It is only available for the ESP32 chip.
#endif
BluetoothSerial BTSerial;
int mpuPinNums[] = {32, 33, 25};
int mpuNum = sizeof(mpuPinNums) / sizeof(int);
void InitMPU(int pinNum);
void SendData(int pinNum);
void setup() {
Serial.begin(115200);
BTSerial.begin(device_name); //Bluetooth device name
Serial.print("start init mpuNum : ");
Serial.println(mpuNum);
for (int i = 0; i < mpuNum;i++)
{
Serial.print("set pin output : ");
Serial.println(mpuPinNums[i]);
pinMode(mpuPinNums[i], OUTPUT);
}
// join I2C bus (I2Cdev library doesn't do this automatically)
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
Wire.setClock(400000); // 400kHz I2C clock. Comment this line if having compilation difficulties
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
for (int i = 0; i < mpuNum;i++)
InitMPU(mpuPinNums[i]);
}
void loop() {
for (int i = 0; i < mpuNum;i++)
SendData(mpuPinNums[i]);
Serial.println("");
}
void InitMPU(int pinNum)
{
for (int i = 0; i < mpuNum; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// initialize device
mpu.initialize();
// verify connection
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// load and configure the DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
//attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
}
void SendData(int pinNum)
{
for (int i = 0; i < mpuNum; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// if programming failed, don't try to do anything
if (!dmpReady) return;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print(pinNum);
Serial.print(":");
Serial.print(int(ypr[0] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[1] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[2] * 180/M_PI));
Serial.print("/");
#endif
}
}
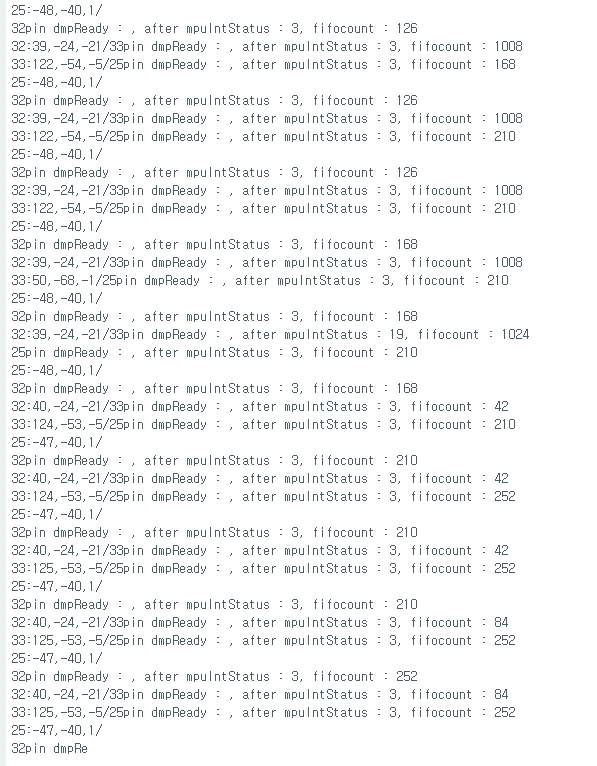
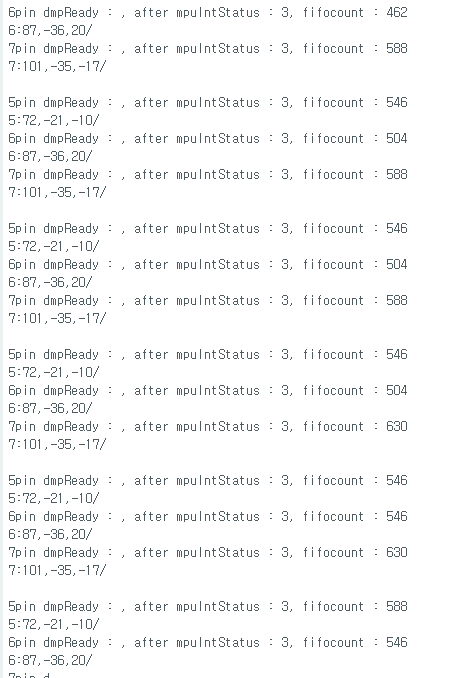
// get current FIFO count
fifoCount = mpu.getFIFOCount();
Serial.print(pinNum);
Serial.print("pin dmpReady : ");
Serial.print(", after mpuIntStatus : ");
Serial.print(mpuIntStatus);
Serial.print(", fifocount : ");
Serial.println(fifoCount);
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
struct YPR
{
int ypr[3];
};
std::map<int, YPR> yprMap;
void InitMPU(int pinNum);
void SendData(int pinNum);
void setup() {
Serial.begin(115200);
BTSerial.begin(device_name); //Bluetooth device name
YPR zeroYpr = {0, 0, 0};
for(int i = 0; i < mpuNum; i++)
yprMap.insert(std::pair<int,YPR>(mpuPinNums[i], zeroYpr));
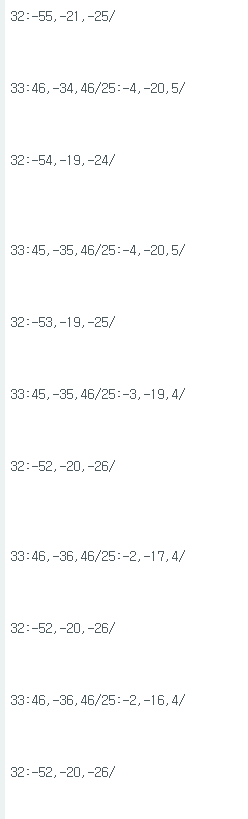
블루투스로 보내도록 전체코드 정리
#include "I2Cdev.h"
#include <map>
#include "MPU6050_6Axis_MotionApps20.h"
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
MPU6050 mpu;
#define OUTPUT_READABLE_YAWPITCHROLL
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorInt16 aa; // [x, y, z] accel sensor measurements
VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements
VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements
VectorFloat gravity; // [x, y, z] gravity vector
float euler[3]; // [psi, theta, phi] Euler angle container
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high
void dmpDataReady() {
mpuInterrupt = true;
}
#include "BluetoothSerial.h"
String device_name = "ESP32-BT-Slave";
// Check if Bluetooth is available
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Check Serial Port Profile
#if !defined(CONFIG_BT_SPP_ENABLED)
#error Serial Port Profile for Bluetooth is not available or not enabled. It is only available for the ESP32 chip.
#endif
BluetoothSerial BTSerial;
int mpuPinNums[] = {32, 33, 25};
int mpuNum = sizeof(mpuPinNums) / sizeof(int);
struct YPR
{
int ypr[3];
};
std::map<int, YPR> yprMap;
void InitMPU(int pinNum);
void GetData(int pinNum);
void SendData();
void setup() {
//Serial.begin(115200);
BTSerial.begin(device_name); //Bluetooth device name
YPR zeroYpr = {0, 0, 0};
for(int i = 0; i < mpuNum; i++)
yprMap.insert(std::pair<int,YPR>(mpuPinNums[i], zeroYpr));
BTSerial.print("start init mpuNum : ");
BTSerial.println(mpuNum);
for (int i = 0; i < mpuNum;i++)
{
BTSerial.print("set pin output : ");
BTSerial.println(mpuPinNums[i]);
pinMode(mpuPinNums[i], OUTPUT);
}
// join I2C bus (I2Cdev library doesn't do this automatically)
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
Wire.setClock(400000); // 400kHz I2C clock. Comment this line if having compilation difficulties
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
for (int i = 0; i < mpuNum;i++)
InitMPU(mpuPinNums[i]);
}
void loop() {
for (int i = 0; i < mpuNum;i++)
GetData(mpuPinNums[i]);
SendData();
}
void InitMPU(int pinNum)
{
for (int i = 0; i < mpuNum; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// initialize device
mpu.initialize();
// verify connection
BTSerial.println(F("Testing device connections..."));
BTSerial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// load and configure the DMP
BTSerial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
BTSerial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
BTSerial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
//attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
BTSerial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
BTSerial.print(F("DMP Initialization failed (code "));
BTSerial.print(devStatus);
BTSerial.println(F(")"));
}
}
void GetData(int pinNum)
{
for (int i = 0; i < mpuNum; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// if programming failed, don't try to do anything
if (!dmpReady) return;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
YPR tmpYpr;
tmpYpr.ypr[0] = int(ypr[0] * 180/M_PI);
tmpYpr.ypr[1] = int(ypr[1] * 180/M_PI);
tmpYpr.ypr[2] = int(ypr[2] * 180/M_PI);
yprMap[pinNum] = tmpYpr;
#endif
}
}
void SendData()
{
for (int i = 0; i < mpuNum; i++)
{
BTSerial.print(mpuPinNums[i]);
BTSerial.print(":");
BTSerial.print(yprMap[mpuPinNums[i]].ypr[0]);
BTSerial.print(",");
BTSerial.print(yprMap[mpuPinNums[i]].ypr[1]);
BTSerial.print(",");
BTSerial.print(yprMap[mpuPinNums[i]].ypr[2]);
if(i == mpuNum - 1)
BTSerial.println("");
else
BTSerial.print("/");
}
}
// join I2C bus (I2Cdev library doesn't do this automatically)
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
Wire.setClock(400000); // 400kHz I2C clock. Comment this line if having compilation difficulties
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
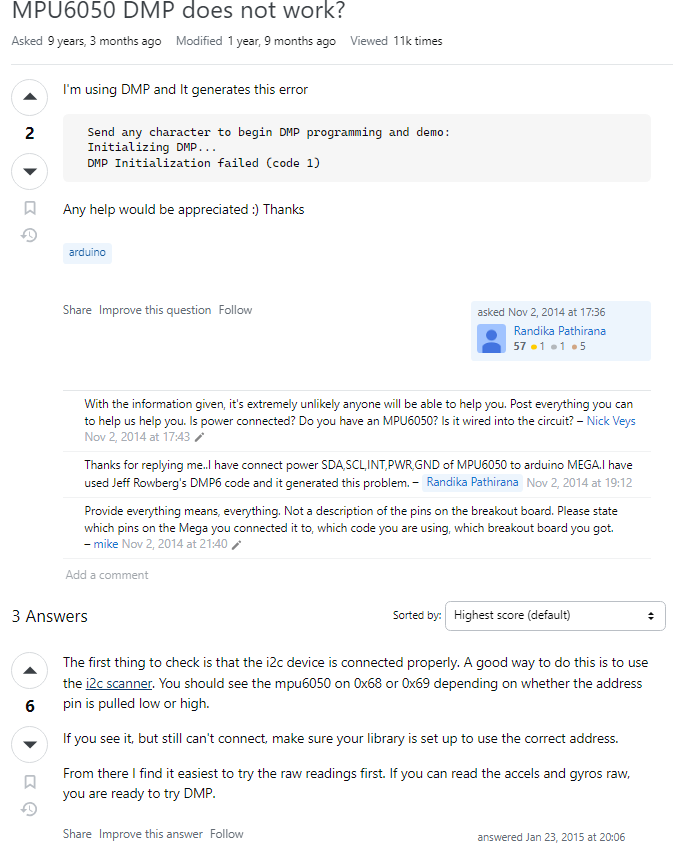
다시 업로드하고 실행시켯는데
dmp 초기화는 잘된것같지만 자세 출력이 안된다..
코드 중간에 mpu interrupt 기다리는 내용이 있어
여기서 막힌것으로 보인다.
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
이 부분을 지우고 나면 잘 동작
어짜피 인터럽트 안써도 대충 원하는대로 동작하므로
대충 FIFO가 가득차서 리프레시 할떄 뺴고는 잘나온다.
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for SparkFun breakout and InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 mpu;
//MPU6050 mpu(0x69); // <-- use for AD0 high
#define OUTPUT_READABLE_YAWPITCHROLL
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorInt16 aa; // [x, y, z] accel sensor measurements
VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements
VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements
VectorFloat gravity; // [x, y, z] gravity vector
float euler[3]; // [psi, theta, phi] Euler angle container
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
// packet structure for InvenSense teapot demo
uint8_t teapotPacket[14] = { '$', 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\r', '\n' };
volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high
void dmpDataReady() {
mpuInterrupt = true;
}
#include "BluetoothSerial.h"
String device_name = "ESP32-BT-Slave";
// Check if Bluetooth is available
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Check Serial Port Profile
#if !defined(CONFIG_BT_SPP_ENABLED)
#error Serial Port Profile for Bluetooth is not available or not enabled. It is only available for the ESP32 chip.
#endif
BluetoothSerial BTSerial;
void setup() {
// join I2C bus (I2Cdev library doesn't do this automatically)
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
Wire.setClock(400000); // 400kHz I2C clock. Comment this line if having compilation difficulties
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
BTSerial.begin(device_name); //Bluetooth device name
Serial.begin(115200);
// initialize device
mpu.initialize();
// verify connection
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// load and configure the DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
//attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
}
void loop() {
// if programming failed, don't try to do anything
if (!dmpReady) return;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
/*
Serial.print(", after mpuIntStatus : ");
Serial.print(mpuIntStatus);
Serial.print(", fifocount : ");
Serial.println(fifoCount);
*/
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
//Serial.print(pinNum);
//Serial.print(":");
Serial.print(int(ypr[0] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[1] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[2] * 180/M_PI));
Serial.print("/");
#endif
}
delay(20);
}
// This example code is in the Public Domain (or CC0 licensed, at your option.)
// By Evandro Copercini - 2018
//
// This example creates a bridge between Serial and Classical Bluetooth (SPP)
// and also demonstrate that SerialBT have the same functionalities of a normal Serial
// Note: Pairing is authenticated automatically by this device
#include "BluetoothSerial.h"
String device_name = "ESP32-BT-Slave";
// Check if Bluetooth is available
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
// Check Serial Port Profile
#if !defined(CONFIG_BT_SPP_ENABLED)
#error Serial Port Profile for Bluetooth is not available or not enabled. It is only available for the ESP32 chip.
#endif
BluetoothSerial SerialBT;
void setup() {
Serial.begin(115200);
SerialBT.begin(device_name); //Bluetooth device name
//SerialBT.deleteAllBondedDevices(); // Uncomment this to delete paired devices; Must be called after begin
Serial.printf("The device with name \"%s\" is started.\nNow you can pair it with Bluetooth!\n", device_name.c_str());
}
void loop() {
if (Serial.available()) {
SerialBT.write(Serial.read());
}
if (SerialBT.available()) {
Serial.write(SerialBT.read());
}
delay(20);
}
void SendData(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// if programming failed, don't try to do anything
if (!dmpReady) return;
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
BTSerial.print(pinNum);
BTSerial.print(":");
BTSerial.print(int(ypr[0] * 180/M_PI));
BTSerial.print(",");
BTSerial.print(int(ypr[1] * 180/M_PI));
BTSerial.print(",");
BTSerial.print(int(ypr[2] * 180/M_PI));
BTSerial.print("/");
#endif
}
}
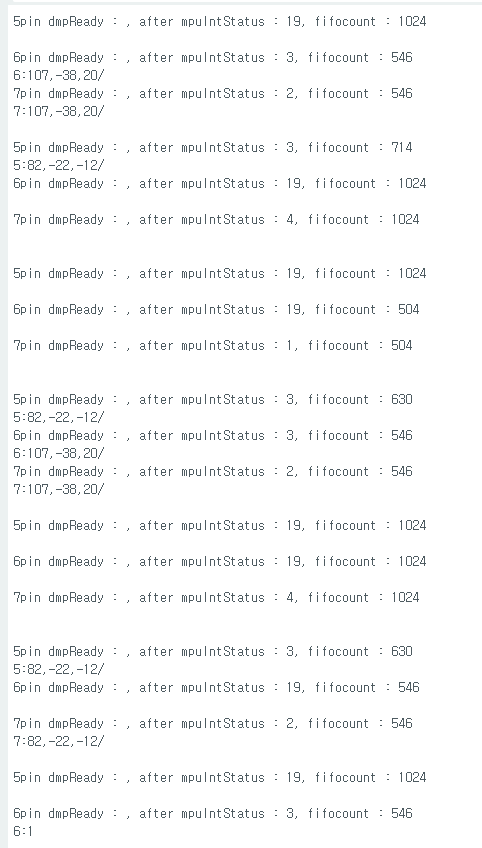
mpu 상태가져오기전에 사용되는 값들 출력시켜봣는데
Serial.println("");
Serial.print(pinNum);
Serial.print("pin dmpReady : ");
Serial.print(dmpReady);
Serial.print(", before mpuInterrupt : ");
Serial.print(mpuInterrupt);
Serial.print(", fifocount : ");
Serial.println(fifoCount);
// if programming failed, don't try to do anything
if (!dmpReady) return;
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
이것만으로 어쩔때 나오고 어쩔때 안나오는지 판단할수가 없엇음.
이번에는
상태랑 피포카운트 출력하도록 수정
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
Serial.print(", after mpuIntStatus : ");
Serial.print(mpuIntStatus);
Serial.print(", fifocount : ");
Serial.println(fifoCount);
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print(pinNum);
Serial.print(":");
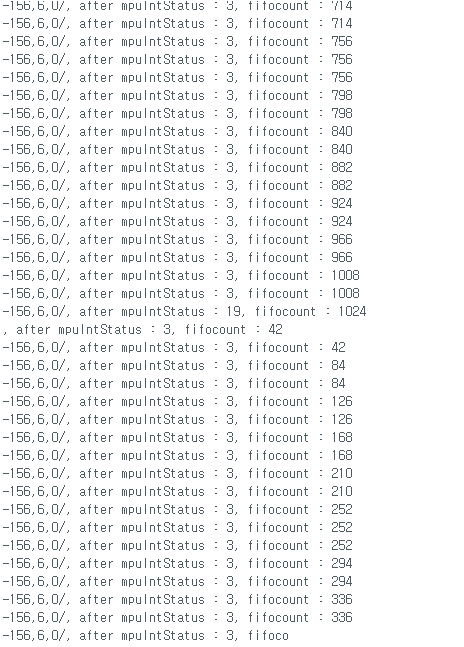
위 코드 대로 mpuIntStatus 가 2일때만 진입해서 출력하는걸 확인
2 외에
1, 3, 4, 19가 자주 발생한다.
잠깐 지금 보니 6, 7때 같은값을 가져오고있었네
mpu3개 연결했는데
루프문을 몇군대 잘못하기도하고
세번째 mpu를 반대로 놓거나
핀아웃을 안해놔서 안떳다.
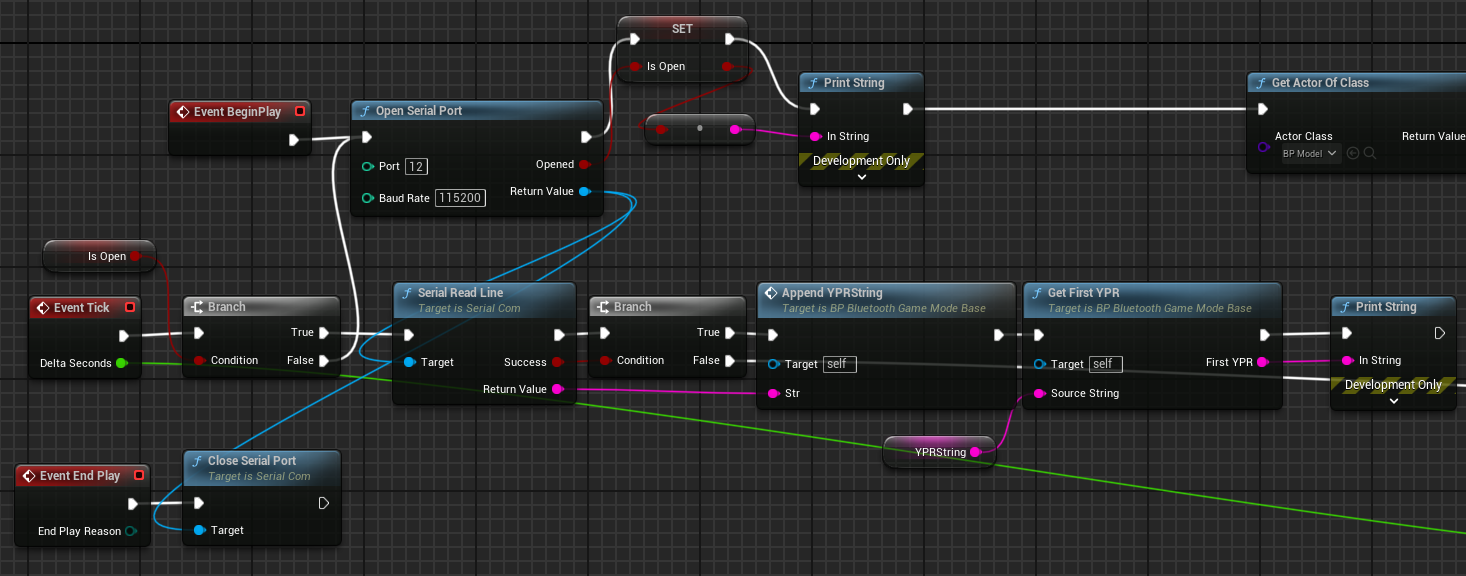
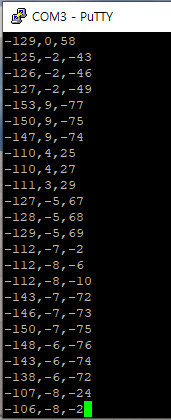
거기다가 블루투스때문에 보드레이트를 9600 해놨었는데
115200으로 했을때 더 잘나온다.
//RXD3, TXD4
SoftwareSerial BTSerial(4, 3);
int mpuPinNums[] = {5, 6, 7};
int mpuNum = sizeof(mpuPinNums) / sizeof(int);
void InitMPU(int pinNum);
void SendData(int pinNum);
void setup() {
for (int i = 0; i < mpuNum;i++)
pinMode(mpuPinNums[i], OUTPUT);
Serial.begin(115200);
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
TWBR = 24; // 400kHz I2C clock (200kHz if CPU is 8MHz)
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
while (!Serial); // wait for Leonardo enumeration, others continue immediately
for (int i = 0; i < mpuNum;i++)
InitMPU(mpuPinNums[i]);
}
void loop() {
for (int i = 0; i < mpuNum;i++)
SendData(mpuPinNums[i]);
Serial.println("");
}
void InitMPU(int pinNum)
{
for (int i = 0; i < mpuNum; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(pinNum, LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
Serial.print("start init pin ");
Serial.println(pinNum);
// initialize device
mpu.initialize();
// verify connection
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// load and configure the DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
//attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
}
void SendData(int pinNum)
{
for (int i = 0; i < mpuNum; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
Serial.println("");
Serial.print(pinNum);
Serial.print("pin dmpReady : ");
// if programming failed, don't try to do anything
if (!dmpReady) return;
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
Serial.print(", after mpuIntStatus : ");
Serial.print(mpuIntStatus);
Serial.print(", fifocount : ");
Serial.println(fifoCount);
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print(pinNum);
Serial.print(":");
Serial.print(int(ypr[0] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[1] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[2] * 180/M_PI));
Serial.print("/");
#endif
}
}
#include "I2Cdev.h"
#include <SoftwareSerial.h>
#include "MPU6050_6Axis_MotionApps20.h"
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for SparkFun breakout and InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 mpu;
//MPU6050 mpu(0x69); // <-- use for AD0 high
#define OUTPUT_READABLE_YAWPITCHROLL
#define LED_PIN 13 // (Arduino is 13, Teensy is 11, Teensy++ is 6)
bool blinkState = false;
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorInt16 aa; // [x, y, z] accel sensor measurements
VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements
VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements
VectorFloat gravity; // [x, y, z] gravity vector
float euler[3]; // [psi, theta, phi] Euler angle container
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
// packet structure for InvenSense teapot demo
uint8_t teapotPacket[14] = { '$', 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\r', '\n' };
volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high
void dmpDataReady() {
mpuInterrupt = true;
}
//RXD3, TXD4
SoftwareSerial BTSerial(4, 3);
int mpuPinNums[] = {5, 6};
void InitMPU(int pinNum);
void SendData(int pinNum);
void setup() {
pinMode(5, OUTPUT);//MPU #1
pinMode(6, OUTPUT);//MPU #2
Serial.begin(115200);
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
TWBR = 24; // 400kHz I2C clock (200kHz if CPU is 8MHz)
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
while (!Serial); // wait for Leonardo enumeration, others continue immediately
for (int i = 0; i<2; i++)
InitMPU(mpuPinNums[i]);
}
void loop() {
for (int i = 0; i<2; i++)
SendData(mpuPinNums[i]);
Serial.println("");
delay(100);
}
void InitMPU(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(pinNum, LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
Serial.print("start init pin ");
Serial.println(pinNum);
// initialize device
mpu.initialize();
// verify connection
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// load and configure the DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
//attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
}
void SendData(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// if programming failed, don't try to do anything
if (!dmpReady) return;
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print(pinNum);
Serial.print(":");
Serial.print(int(ypr[0] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[1] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[2] * 180/M_PI));
Serial.print("/");
#endif
}
}
기존의 초기화, 각 가져오는 코드는 따로빼고
AD0 핀들 output 설정
int mpuPinNums[] = {5, 6};
void InitMPU(int pinNum);
void SendData(int pinNum);
void setup() {
pinMode(5, OUTPUT);//MPU #1
pinMode(6, OUTPUT);//MPU #2
Serial.begin(115200);
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
TWBR = 24; // 400kHz I2C clock (200kHz if CPU is 8MHz)
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
while (!Serial); // wait for Leonardo enumeration, others continue immediately
for (int i = 0; i<2; i++)
InitMPU(mpuPinNums[i]);
}
초기화 코드에서는
모든 mpu를 돌아가면서 초기화하는데
선택된 mpu만 주소를 0x68로 설정하고 수행
나머지는 초기화전 0x69로 설정
void InitMPU(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(pinNum, LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
Serial.print("start init pin ");
Serial.println(pinNum);
// initialize device
mpu.initialize();
// verify connection
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// load and configure the DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
//attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
}
루프의 경우 각 mpu 돌아가면서 각 출력하고 딜레이 주는식으로 정리
void loop() {
for (int i = 0; i<2; i++)
SendData(mpuPinNums[i]);
Serial.println("");
delay(50);
}
senddata의 경우
초기화때와 마찬가지로 선택된 mpu만 가져오도록 설정
void SendData(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// if programming failed, don't try to do anything
if (!dmpReady) return;
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print(pinNum);
Serial.print(":");
Serial.print(int(ypr[0] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[1] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[2] * 180/M_PI));
Serial.print("/");
#endif
}
}
이 코드는 배터리가 아닌 PC전원으로 쓰면서
115200 시리얼 통신으로 가져와 쓰드록 정리
#include "I2Cdev.h"
#include <SoftwareSerial.h>
#include "MPU6050_6Axis_MotionApps20.h"
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for SparkFun breakout and InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 mpu;
//MPU6050 mpu(0x69); // <-- use for AD0 high
#define OUTPUT_READABLE_YAWPITCHROLL
#define LED_PIN 13 // (Arduino is 13, Teensy is 11, Teensy++ is 6)
bool blinkState = false;
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorInt16 aa; // [x, y, z] accel sensor measurements
VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements
VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements
VectorFloat gravity; // [x, y, z] gravity vector
float euler[3]; // [psi, theta, phi] Euler angle container
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
// packet structure for InvenSense teapot demo
uint8_t teapotPacket[14] = { '$', 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\r', '\n' };
volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high
void dmpDataReady() {
mpuInterrupt = true;
}
//RXD3, TXD4
SoftwareSerial BTSerial(4, 3);
int mpuPinNums[] = {5, 6};
void InitMPU(int pinNum);
void SendData(int pinNum);
void setup() {
pinMode(5, OUTPUT);//MPU #1
pinMode(6, OUTPUT);//MPU #2
Serial.begin(115200);
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
TWBR = 24; // 400kHz I2C clock (200kHz if CPU is 8MHz)
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
while (!Serial); // wait for Leonardo enumeration, others continue immediately
for (int i = 0; i<2; i++)
InitMPU(mpuPinNums[i]);
}
void loop() {
for (int i = 0; i<2; i++)
SendData(mpuPinNums[i]);
Serial.println("");
delay(50);
}
void InitMPU(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(pinNum, LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
Serial.print("start init pin ");
Serial.println(pinNum);
// initialize device
mpu.initialize();
// verify connection
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// load and configure the DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
//attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
}
void SendData(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// if programming failed, don't try to do anything
if (!dmpReady) return;
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print(pinNum);
Serial.print(":");
Serial.print(int(ypr[0] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[1] * 180/M_PI));
Serial.print(",");
Serial.print(int(ypr[2] * 180/M_PI));
Serial.print("/");
#endif
}
}
이번엔 블루투스로 변경
딜레이 100주면 115200 써도 되나모르겟다.
안되서 9600으로 다시진행
#include "I2Cdev.h"
#include <SoftwareSerial.h>
#include "MPU6050_6Axis_MotionApps20.h"
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68 (default for SparkFun breakout and InvenSense evaluation board)
// AD0 high = 0x69
MPU6050 mpu;
//MPU6050 mpu(0x69); // <-- use for AD0 high
#define OUTPUT_READABLE_YAWPITCHROLL
#define LED_PIN 13 // (Arduino is 13, Teensy is 11, Teensy++ is 6)
bool blinkState = false;
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorInt16 aa; // [x, y, z] accel sensor measurements
VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements
VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements
VectorFloat gravity; // [x, y, z] gravity vector
float euler[3]; // [psi, theta, phi] Euler angle container
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
// packet structure for InvenSense teapot demo
uint8_t teapotPacket[14] = { '$', 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\r', '\n' };
volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high
void dmpDataReady() {
mpuInterrupt = true;
}
//RXD3, TXD4
SoftwareSerial BTSerial(4, 3);
int mpuPinNums[] = {5, 6};
void InitMPU(int pinNum);
void SendData(int pinNum);
void setup() {
pinMode(5, OUTPUT);//MPU #1
pinMode(6, OUTPUT);//MPU #2
BTSerial.begin(9600);
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
TWBR = 24; // 400kHz I2C clock (200kHz if CPU is 8MHz)
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
while (!Serial); // wait for Leonardo enumeration, others continue immediately
InitMPU(5);
InitMPU(6);
}
void loop() {
SendData(5);
SendData(6);
BTSerial.println("");
delay(100);
}
void InitMPU(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(pinNum, LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
BTSerial.print("start init pin ");
BTSerial.println(pinNum);
// initialize device
mpu.initialize();
// verify connection
BTSerial.println(F("Testing device connections..."));
BTSerial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// load and configure the DMP
BTSerial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
BTSerial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
BTSerial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
//attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
BTSerial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
BTSerial.print(F("DMP Initialization failed (code "));
BTSerial.print(devStatus);
BTSerial.println(F(")"));
}
}
void SendData(int pinNum)
{
for (int i = 0; i < 2; i++)
{
if (mpuPinNums[i] == pinNum)
digitalWrite(mpuPinNums[i], LOW); //set selected mpu6050 addr 0x68
else
digitalWrite(mpuPinNums[i], HIGH); //set other mpu6050 addr 0x69
}
// if programming failed, don't try to do anything
if (!dmpReady) return;
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
BTSerial.print(pinNum);
BTSerial.print(":");
BTSerial.print(int(ypr[0] * 180/M_PI));
BTSerial.print(",");
BTSerial.print(int(ypr[1] * 180/M_PI));
BTSerial.print(",");
BTSerial.print(int(ypr[2] * 180/M_PI));
BTSerial.print("/");
#endif
}
}
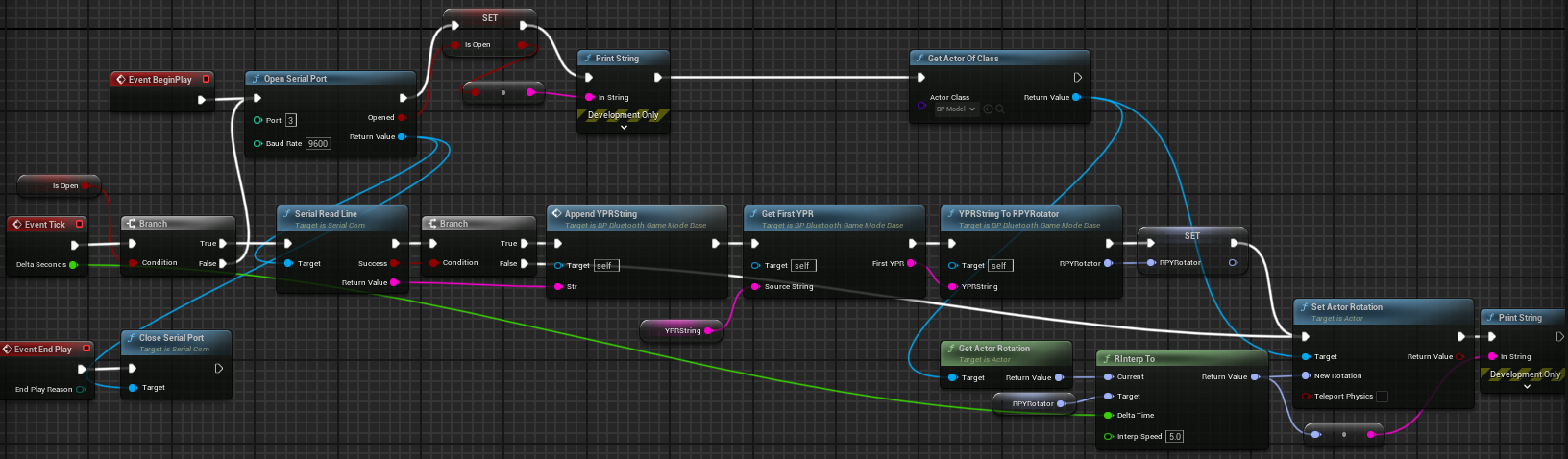
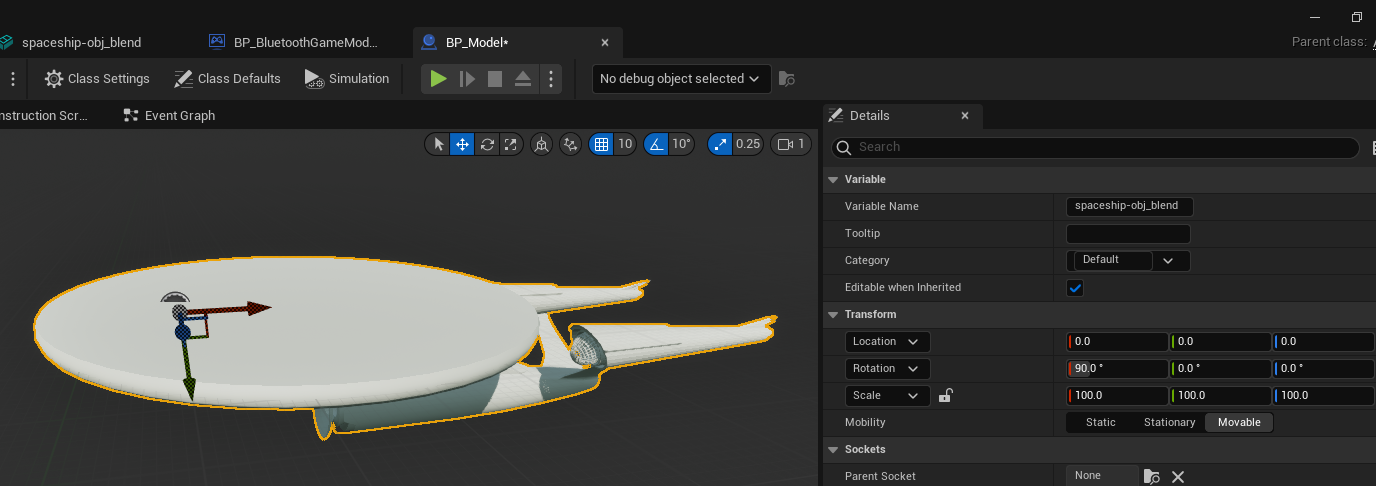
q : 언리얼엔진에서 1초 간격으로 100,50,3 100,10,2 100,30,1 이 값들이 순서대로 들어와서 액터의 회전값으로 사용했어 하지만 이벤트 틱은 매우 빠르게 반복되잔아? 이 값들이 1초마다 들어오다보니 액터 회전이 부드럽지 않고 딱딱끊겨있어 어떻게하면 회전 동작을 부드럽게 보간할수있을까
a : 언리얼 엔진에서 액터의 회전을 부드럽게 보간하기 위해 사용할 수 있는 방법 중 하나는 보간 기법을 적용하는 것입니다. 아래는 예시 코드로 보간을 구현하는 방법입니다:
1. 액터 클래스에 변수 추가: - FVector TargetRotation; // 목표 회전값 - float InterpSpeed; // 보간 속도
2. 이벤트 틱 함수 내에서 보간 로직 추가: - FVector CurrentRotation = GetActorRotation().Euler(); // 현재 회전값 - FVector NewRotation = FMath::VInterpTo(CurrentRotation, TargetRotation, DeltaTime, InterpSpeed); // 보간된 회전값 계산 - SetActorRotation(FRotator(NewRotation.X, NewRotation.Y, NewRotation.Z)); // 액터에 회전값 적용
3. 1초마다 값 갱신: - 매 1초마다 TargetRotation 변수에 새로운 회전값을 설정합니다.
이렇게 구현하면 이벤트 틱이 매우 빠르게 반복되더라도 보간 기법을 사용하여 액터의 회전을 부드럽게 보간할 수 있습니다. 보간 속도(InterpSpeed)를 조정하여 원하는 부드러움 수준을 설정할 수도 있습니다.
q : C++코드 대신 블루프린트로 설정법 알려줘
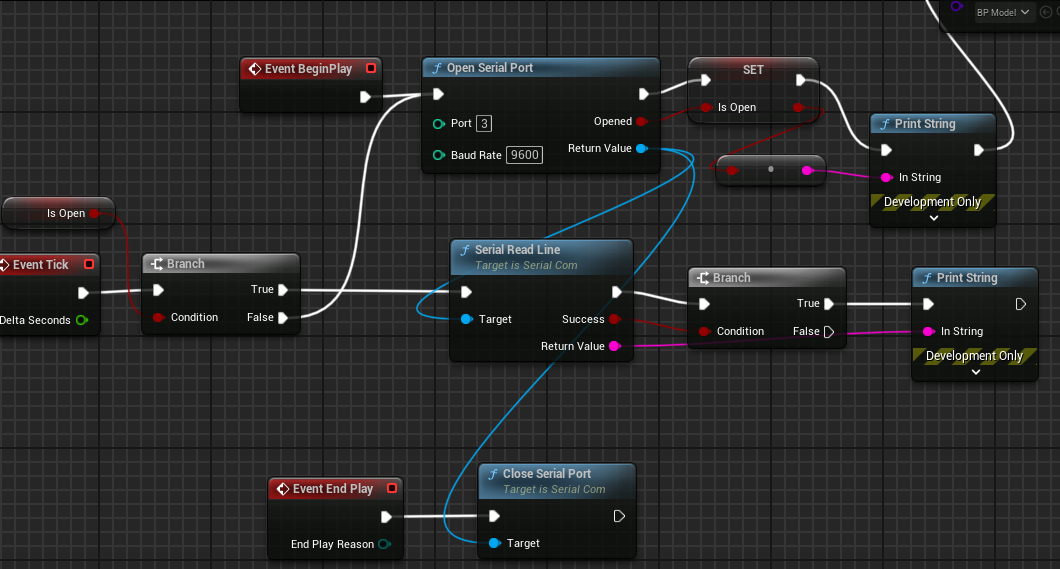
a : 블루프린트에서 액터의 회전을 부드럽게 보간하기 위해서는 노드를 조합하여 구현할 수 있습니다.
1. 액터 블루프린트에서 변수 추가: - TargetRotation: Rotator // 목표 회전값 - InterpSpeed: Float // 보간 속도
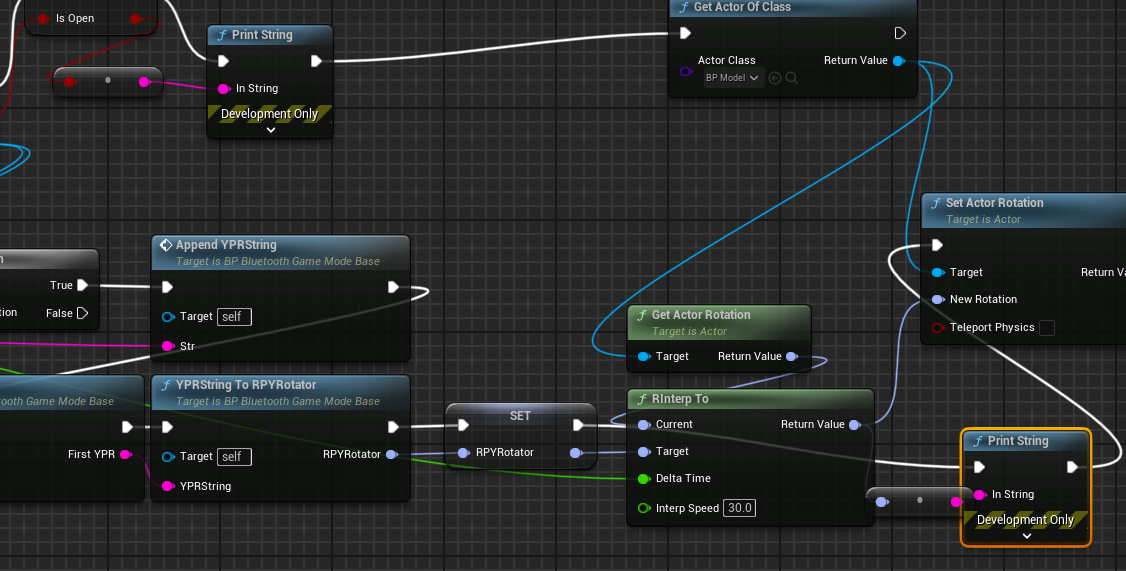
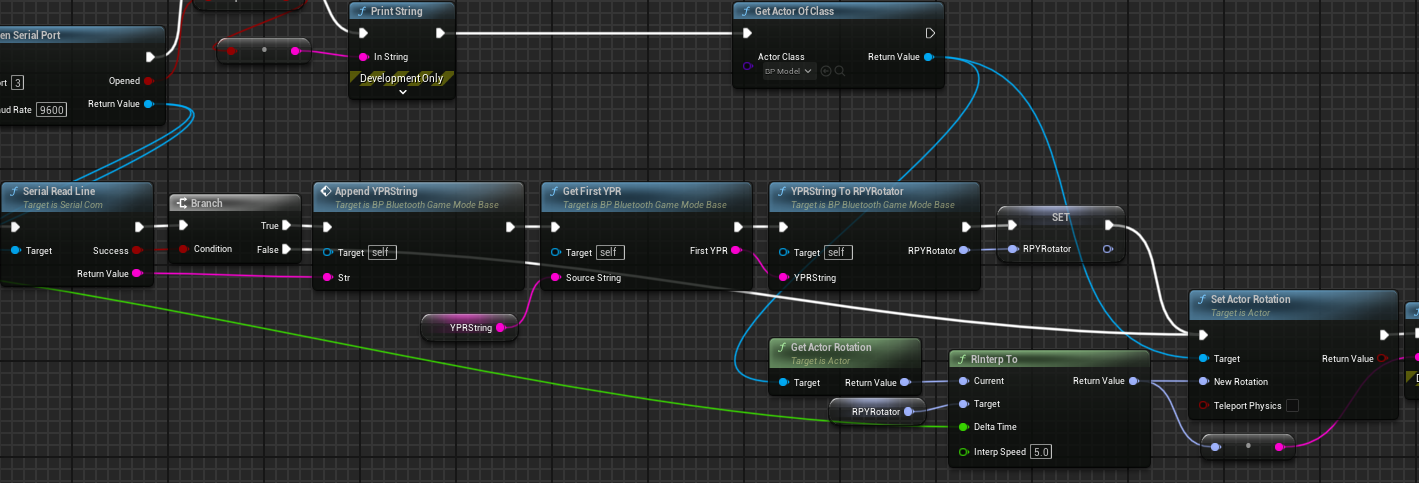
2. 블루프린트 그래프에서 보간 로직 추가: - "GetActorRotation" 노드로 현재 회전값을 가져옵니다. - "Break Rotator" 노드로 현재 회전값을 나눠서 X, Y, Z 각도 값을 추출합니다. - "Make Rotator" 노드로 TargetRotation 변수 값을 Rotator 형태로 만듭니다. - "Delta Seconds" 노드를 사용하여 Delta Time 값을 가져옵니다. - "VInterp To" 노드로 현재 회전값과 목표 회전값을 보간하여 보간된 회전값을 계산합니다. - "SetActorRotation" 노드로 액터에 보간된 회전값을 적용합니다.
3. 1초마다 값 갱신: - "Set Timer by Event" 노드를 사용하여 1초마다 보간할 회전값을 설정하는 이벤트를 생성합니다. - 이벤트에서 "Set Actor Rotation" 노드를 사용하여 TargetRotation 변수 값을 변경합니다.
이렇게 구현하면 블루프린트에서도 보간 기법을 사용하여 액터의 회전을 부드럽게 보간할 수 있습니다. 보간 속도(InterpSpeed)를 조정하여 원하는 부드러움 수준을 설정할 수도 있습니다.
얘 대답이 맞든 틀리든 대충 비슷하겐 할수잇을듯
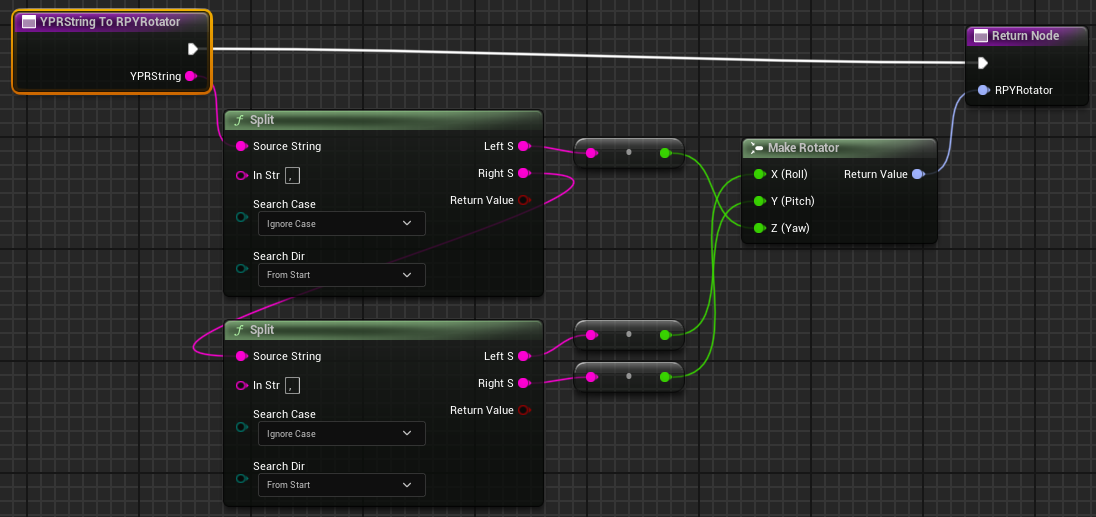
위에서 틀린건 나는 벡터가 아니라 로테이터 쓰니
RInterpTo 쓰려고하는데
deltaTime이야 이벤트틱에서 나오는거 쓰면될거같고.
보간속도는 얼마나 하면될지 모르겟다.
아쉬운데로 질문
q : 언리얼엔진 RInterpTo에 대해서 자세히 설명해줘 여기서 interp speed는 몇으로 하는게 적당할까?
a : RInterpTo 함수에서 사용되는 보간 속도(Interp Speed)는 원하는 부드러움의 정도를 결정하는 매개변수입니다. 이 값은 프로젝트의 요구사항과 시각적인 효과에 따라 다를 수 있습니다.
적당한 보간 속도를 선택하는 것은 상황과 개발자의 취향에 따라 다를 수 있지만, 몇 가지 일반적인 가이드라인이 있습니다:
1. 느린 보간 속도: 저속으로 회전하는 액터나 오브젝트에 적합합니다. 예를 들어, 천천히 돌아가는 문이나 회전하는 플랫폼 등을 구현할 때 사용할 수 있습니다.
2. 중간 보간 속도: 대부분의 상황에서 적합한 기본값입니다. 일반적인 캐릭터의 회전이나 카메라 이동 등에 사용될 수 있습니다. 대부분의 경우, 5-10 정도의 값을 사용하는 것이 적당합니다.
3. 빠른 보간 속도: 빠른 이동이나 반응성이 필요한 상황에 적합합니다. 빠른 캐릭터의 회전이나 빠르게 이동하는 물체 등을 구현할 때 사용될 수 있습니다. 높은 값인 15 이상의 값을 사용할 수 있습니다.
위의 값은 일반적인 가이드일 뿐이며, 프로젝트의 필요에 따라 조정할 수 있습니다. 보간 속도를 조정하여 원하는 시각적인 효과를 얻을 수 있으며, 필요에 따라 여러 값을 실험해보면서 적절한 보간 속도를 찾을 수 있습니다.
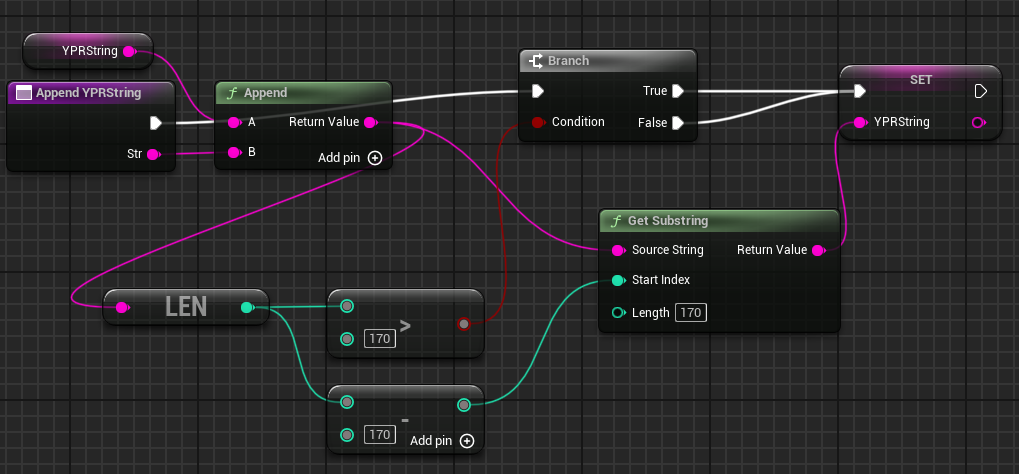
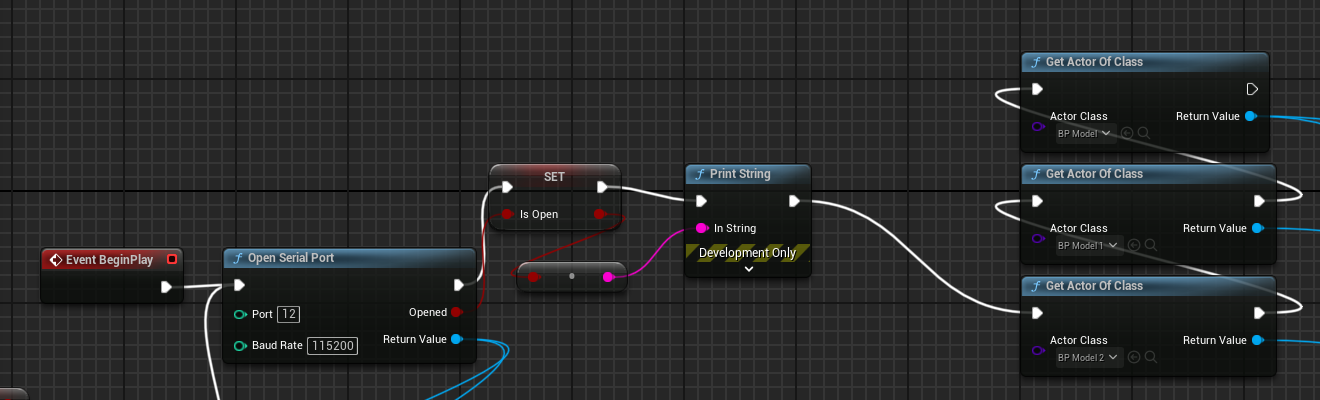
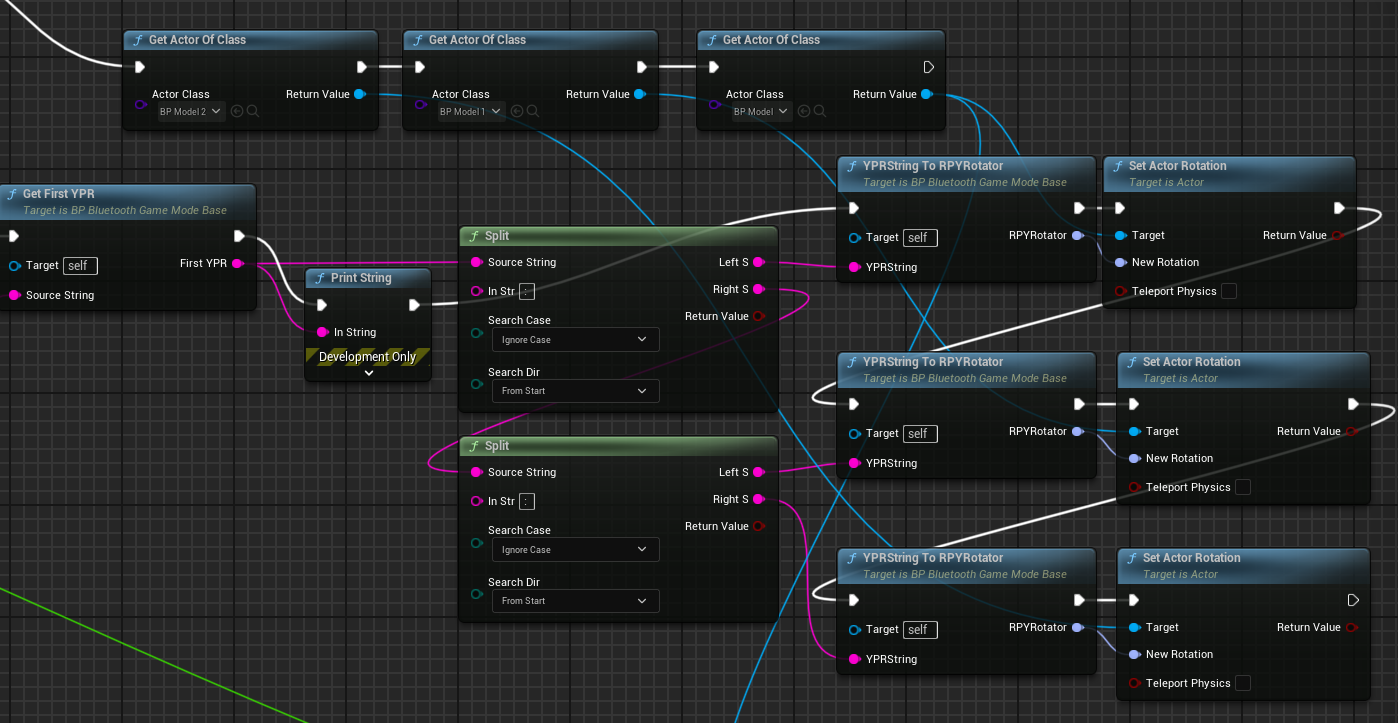
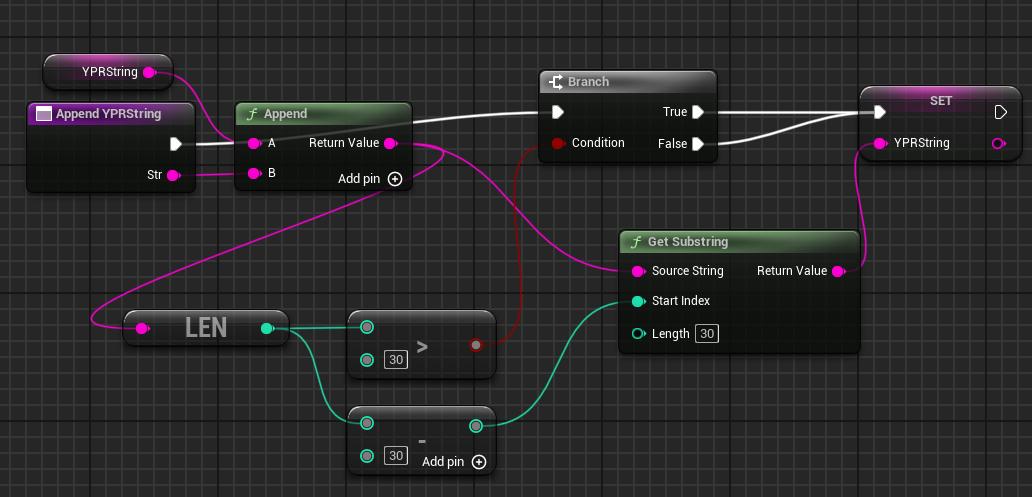
RPYRotator 가 바뀌면 PrevRPYRotator에 저장하고 새값을 RPYRotator에 저장한 상태에서